Project information
- Title: Learning-based Control for Tendon-Driven Continuum Robot
- Supervisor: Prof. S. Ali A. Moosavian
- Project date: Sep 2023
- Code: nima.maghooli@ut.ac.ir
Further detail
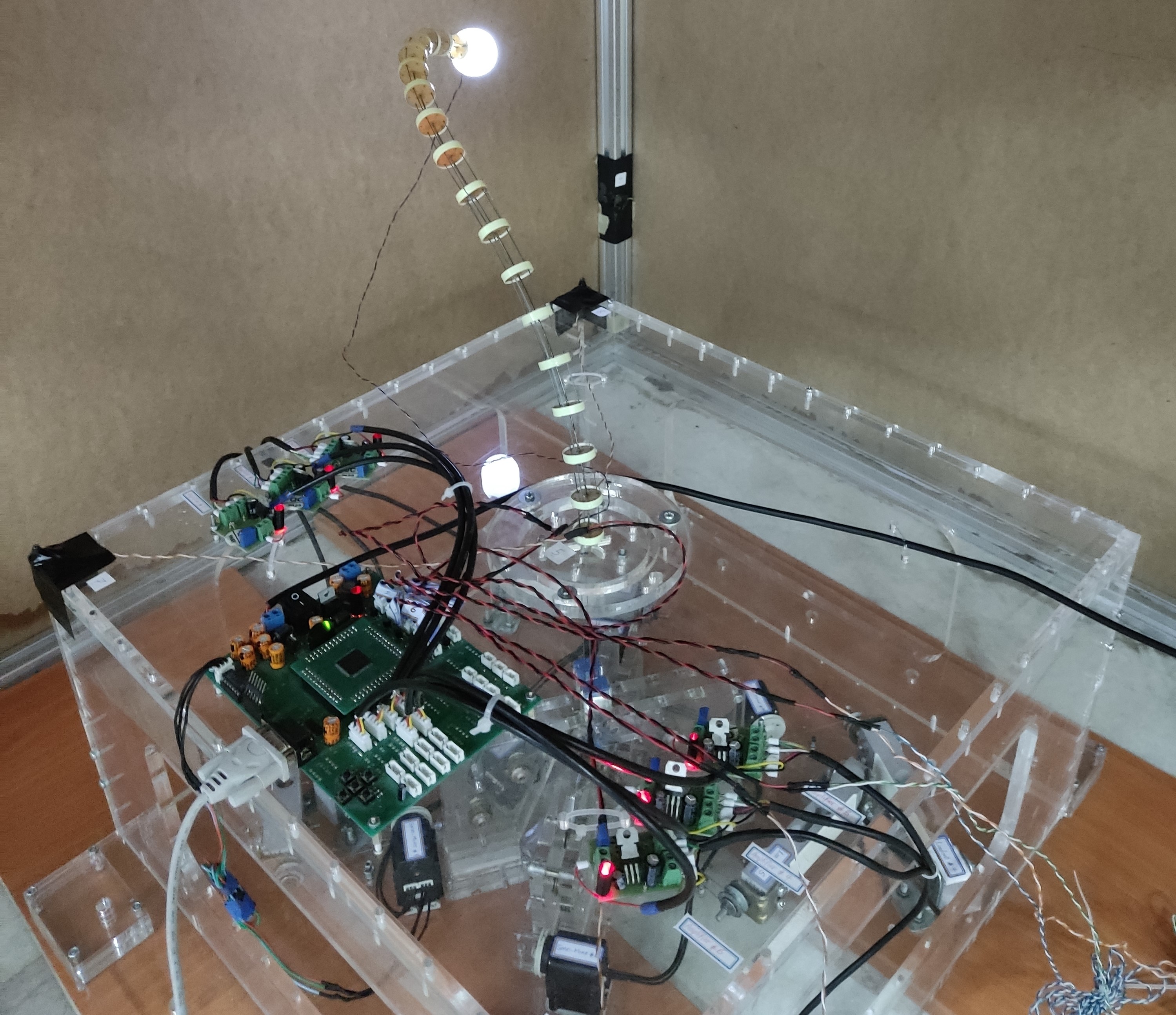
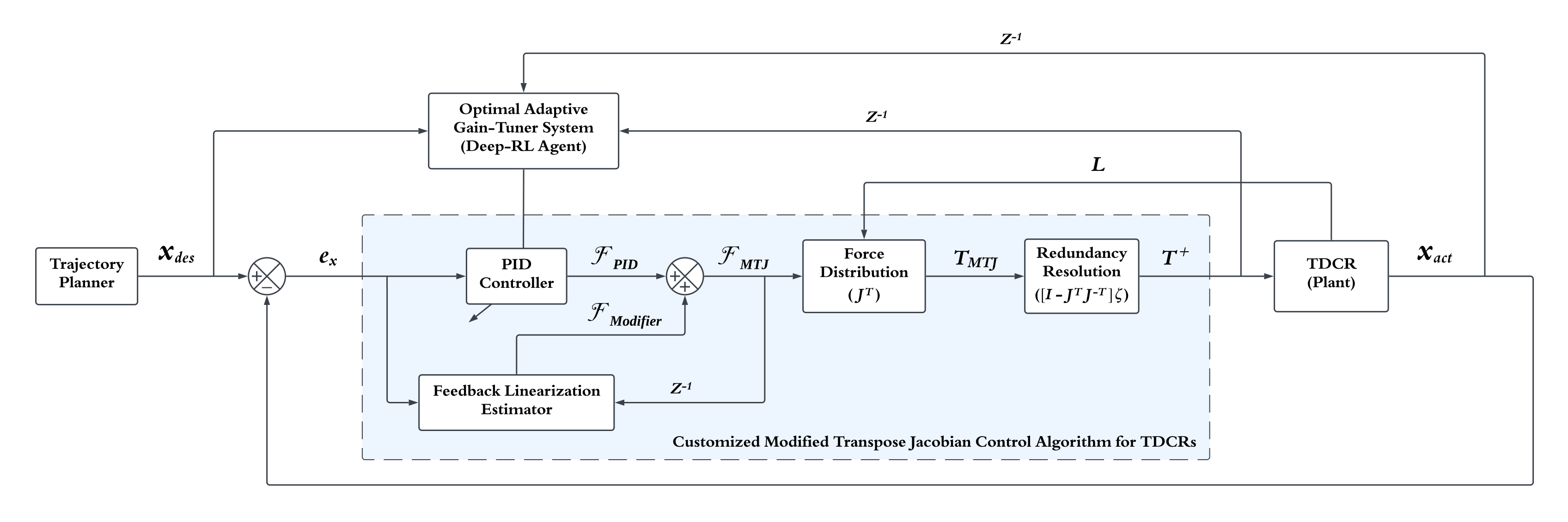
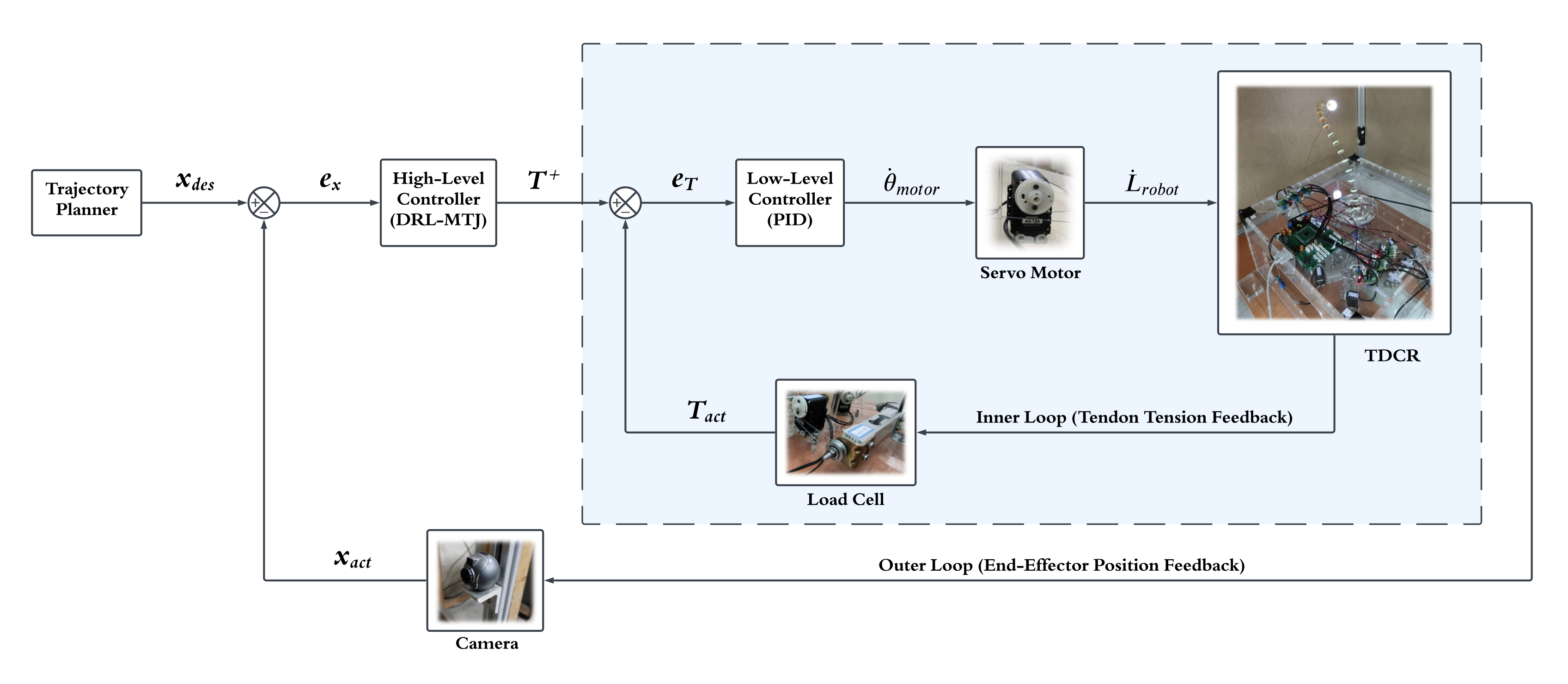
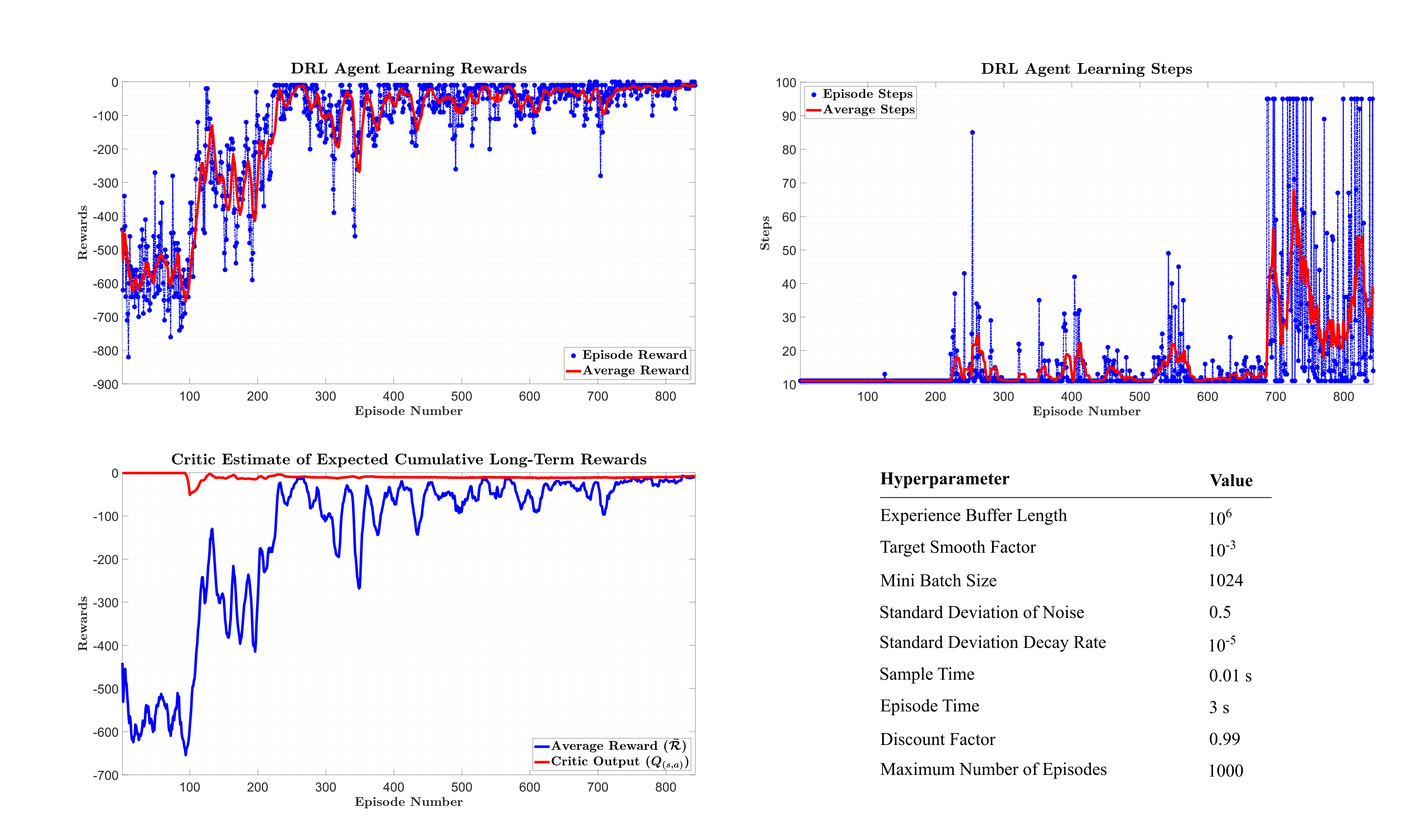
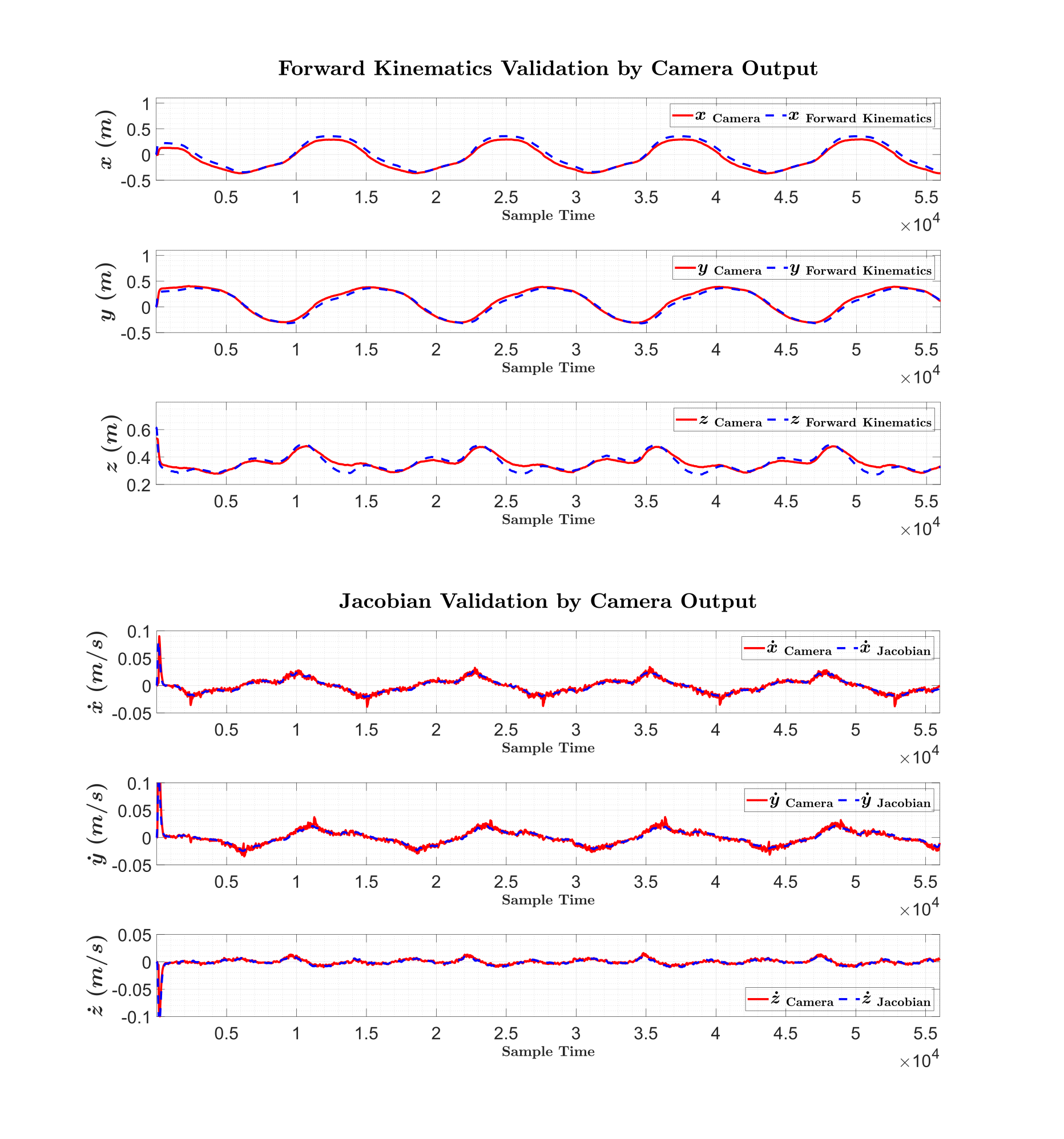
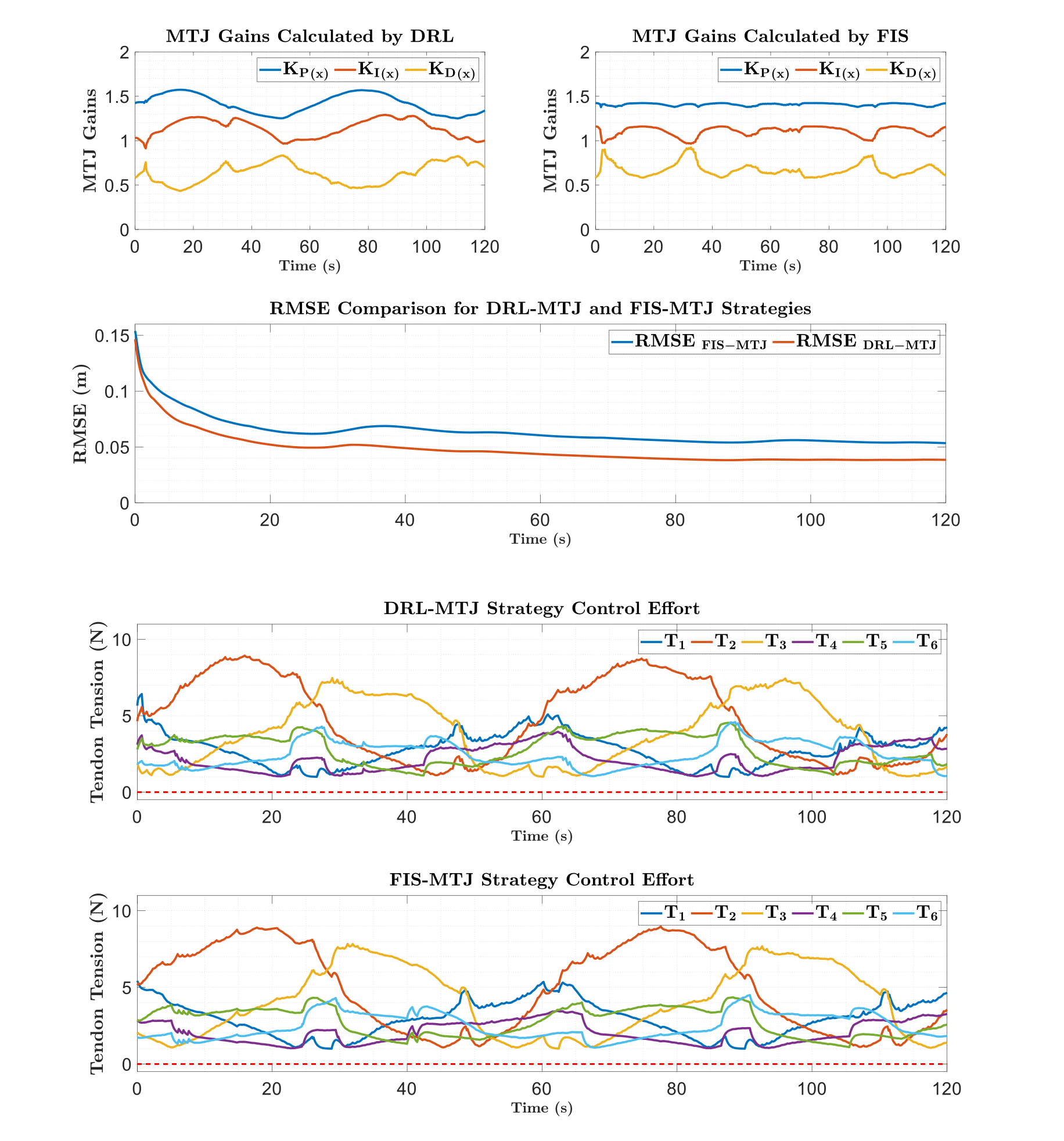
Robo-Arm is a Tendon-Driven Continuum Robot (TDCR) developed as a prototype for modeling and testing advanced control algorithms for Minimally Invasive Surgery (MIS) at the Advanced Robotics and Automated Systems (ARAS) Laboratory. This research presents a centralized position control strategy using Deep Reinforcement Learning, with a particular focus on the Sim-to-Real transfer of control policies. The proposed method employs a customized Modified Transpose Jacobian control strategy for continuum arms, where its parameters are optimally tuned using the Deep Deterministic Policy Gradient algorithm. By integrating an optimal adaptive gain-tuning regulation, the research aims to develop a model-free controller that achieves superior performance compared to ideal model-based strategies. Both simulations and real-world experiments demonstrate that the proposed controller significantly enhances the trajectory-tracking performance of continuum manipulators. The proposed controller achieves robustness across various initial conditions and trajectories, making it a promising candidate for general-purpose applications.