Project information
- Title: Learning-based Control for Spherical Parallel Robot
- Supervisor: Prof. S. Ali A. Moosavian
- Project date: May 2025
- Code: nima.maghooli@ut.ac.ir
Further detail
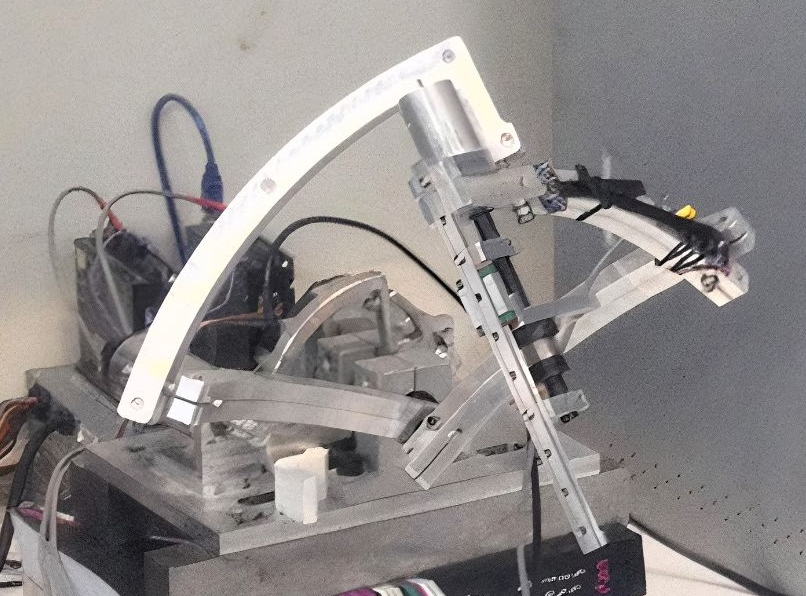
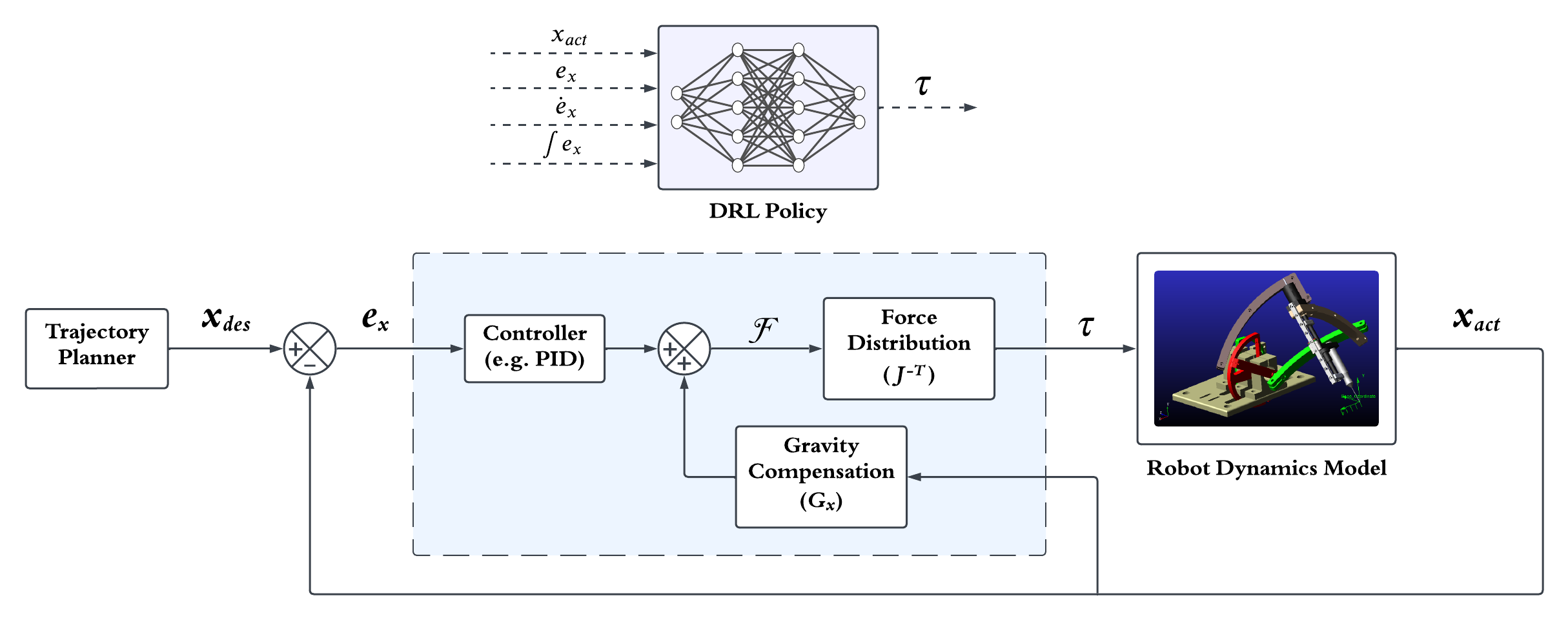
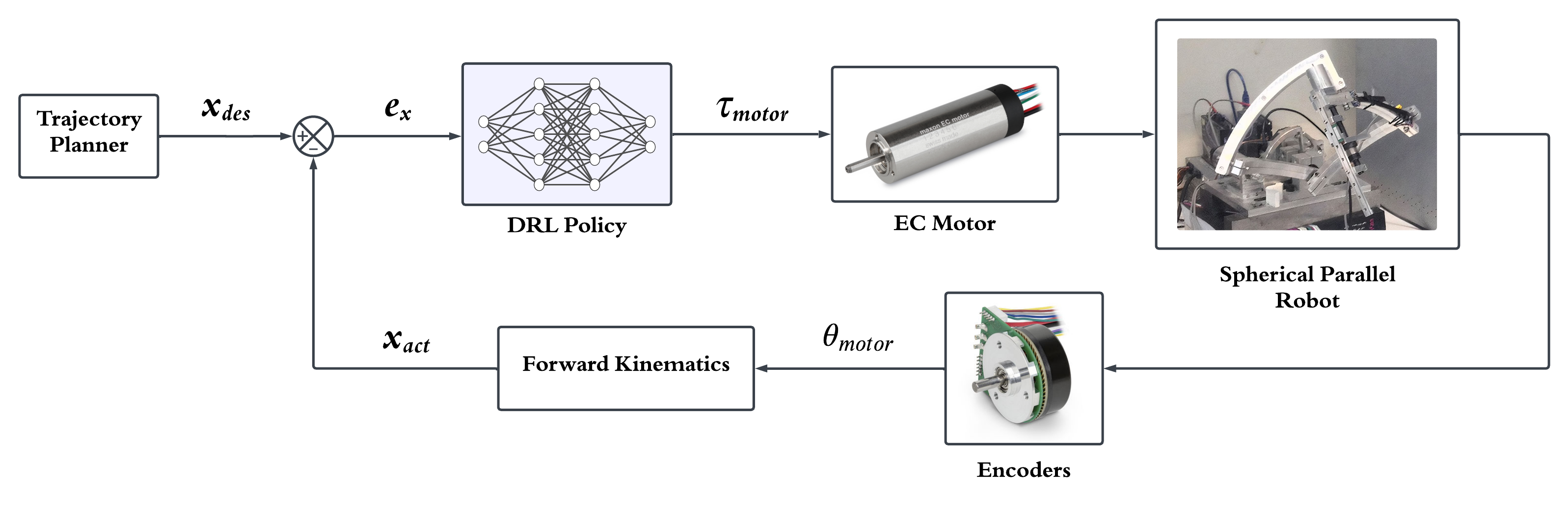
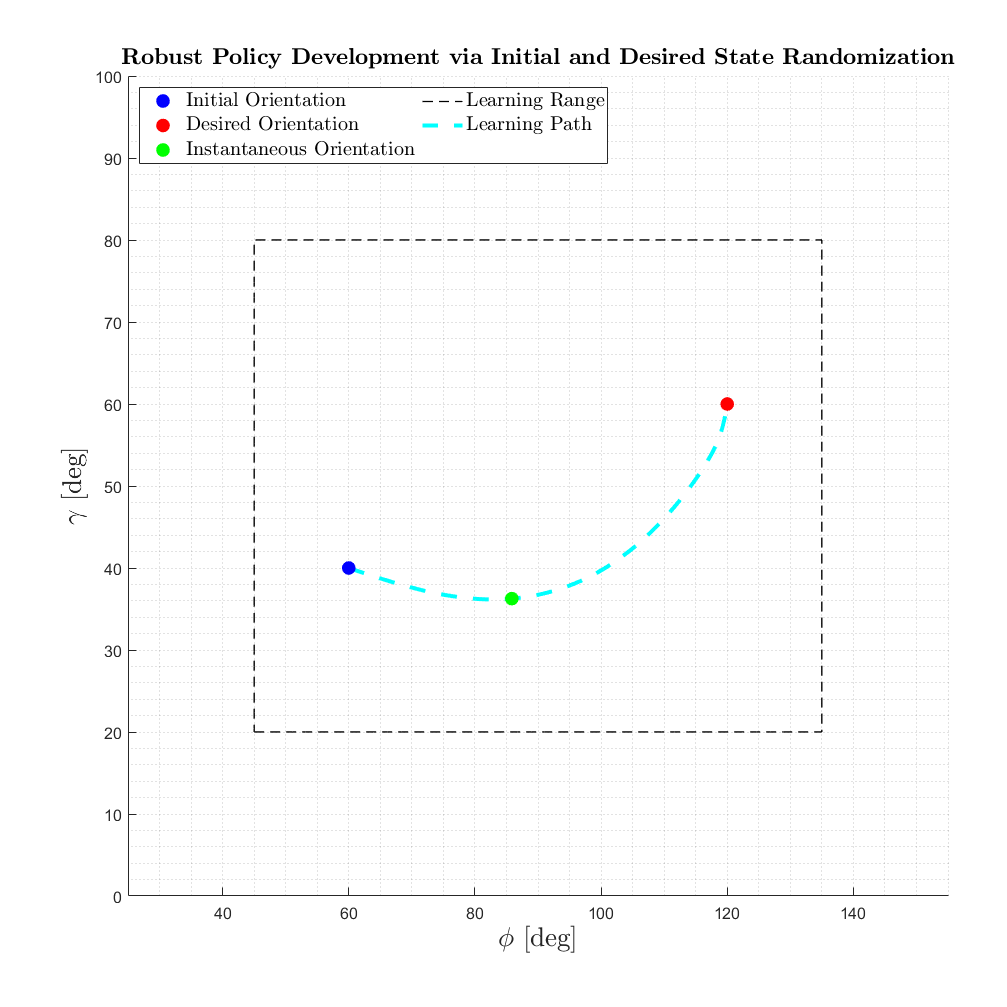
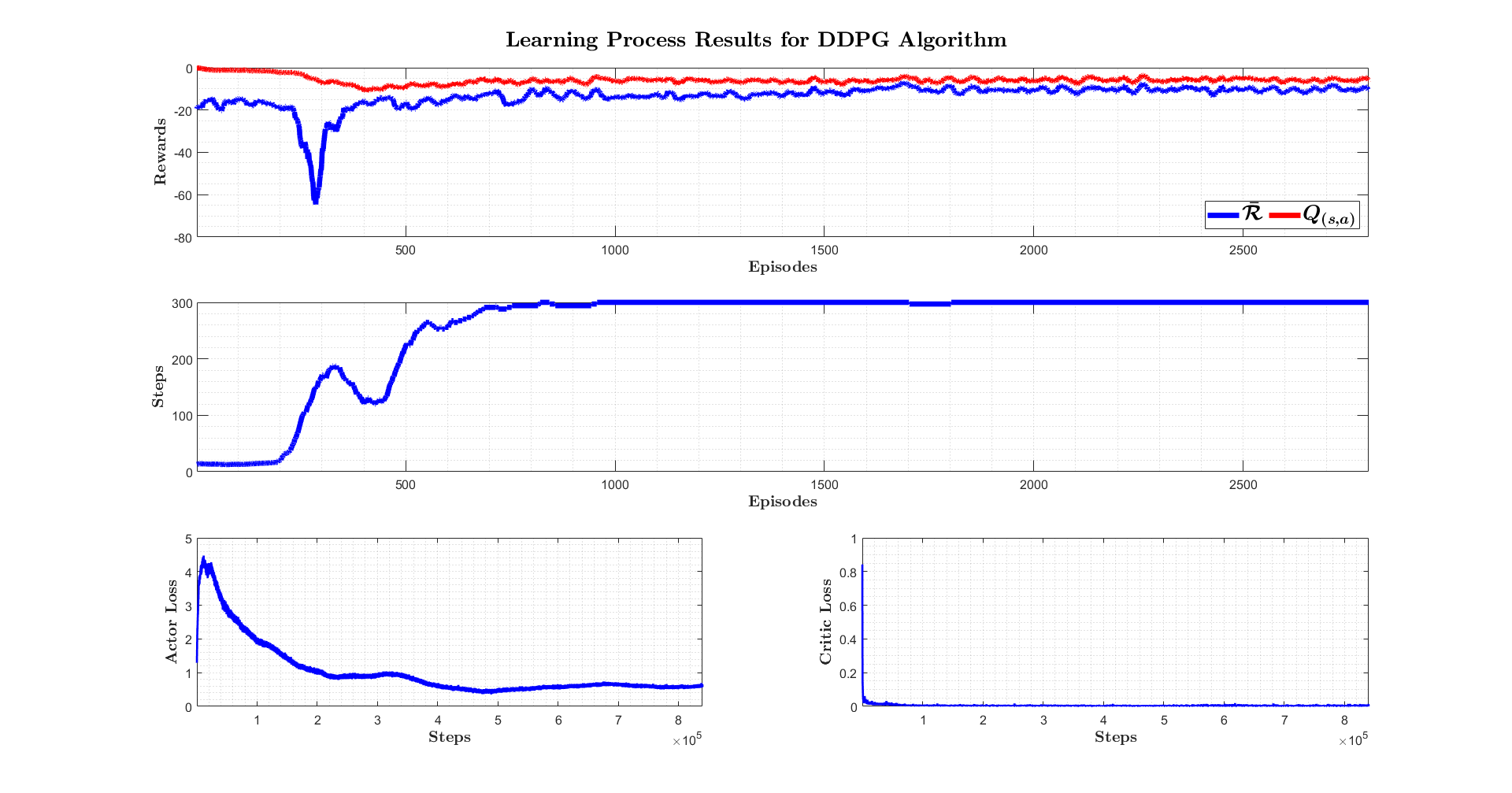
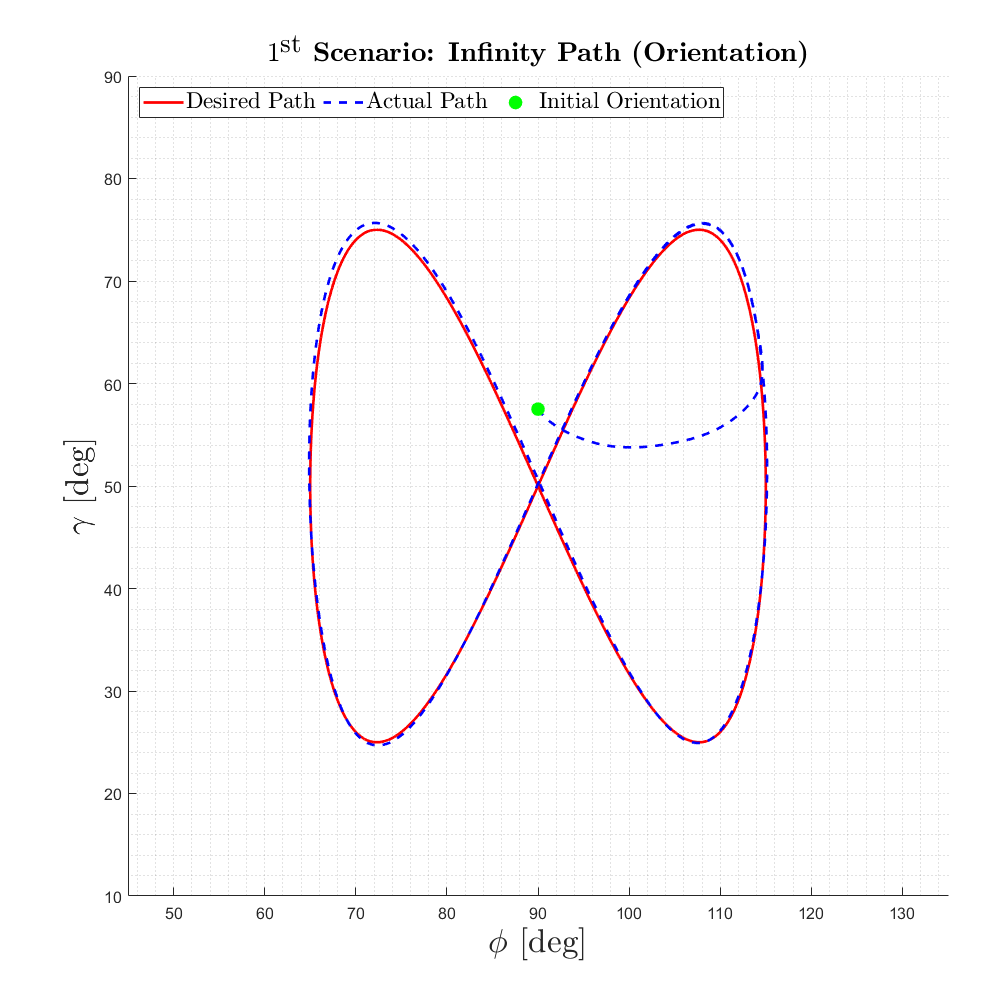
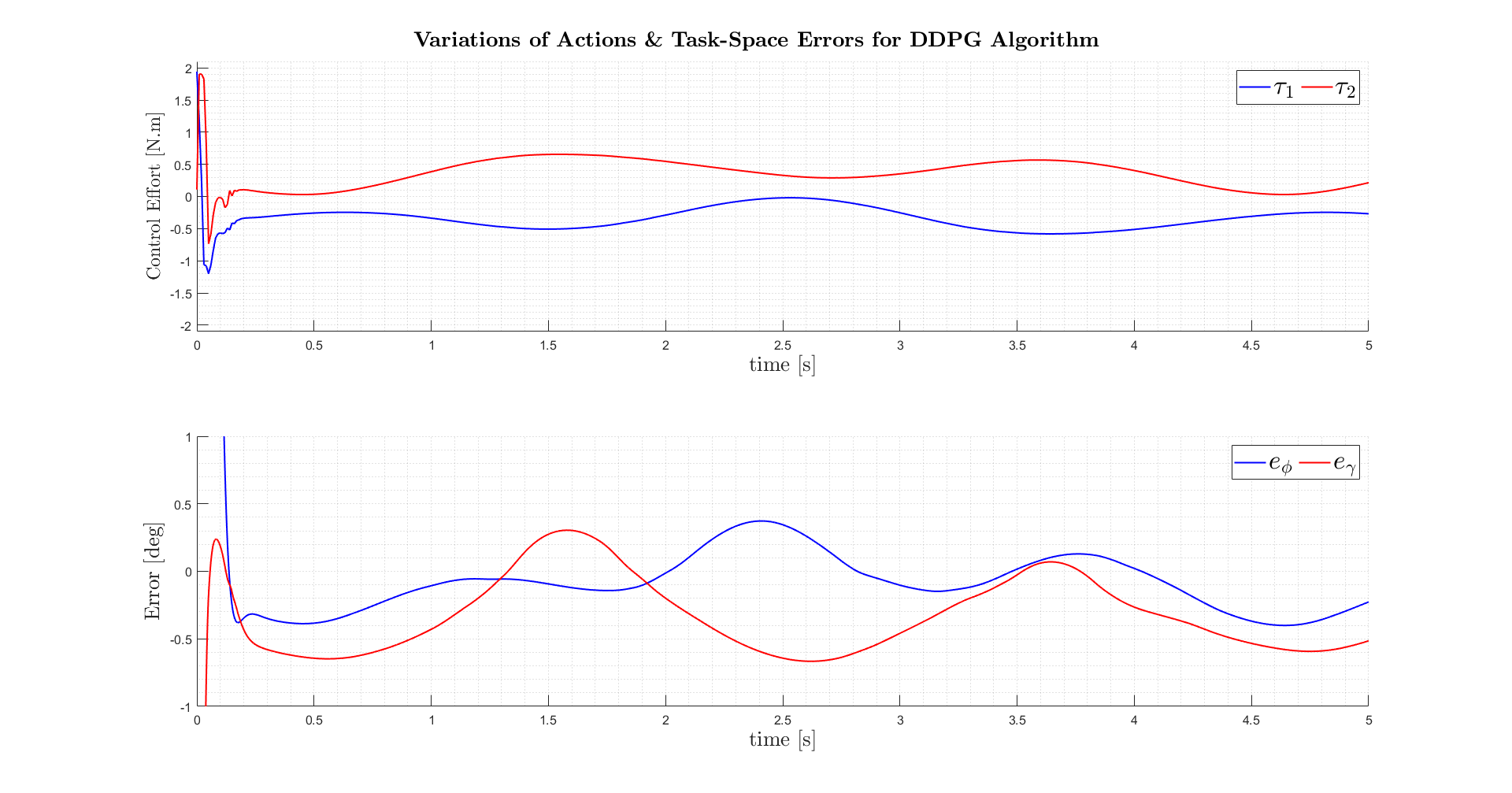
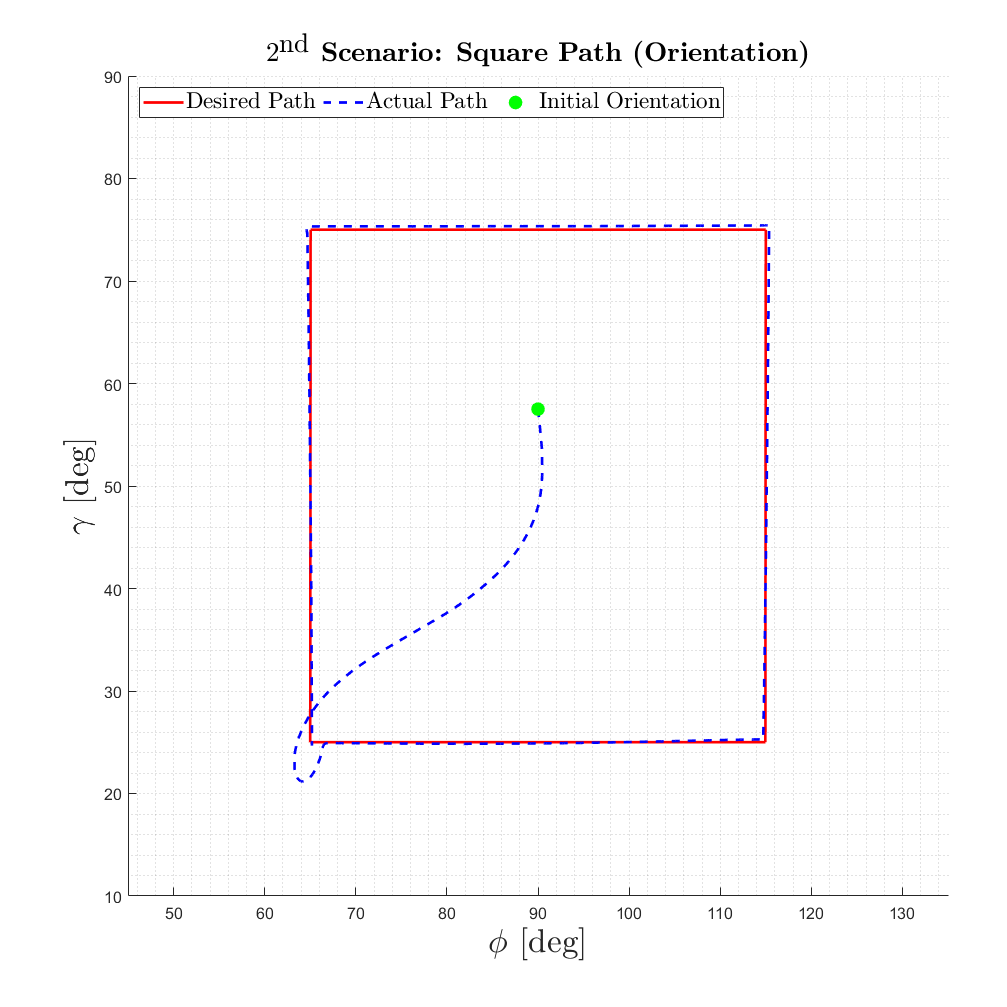
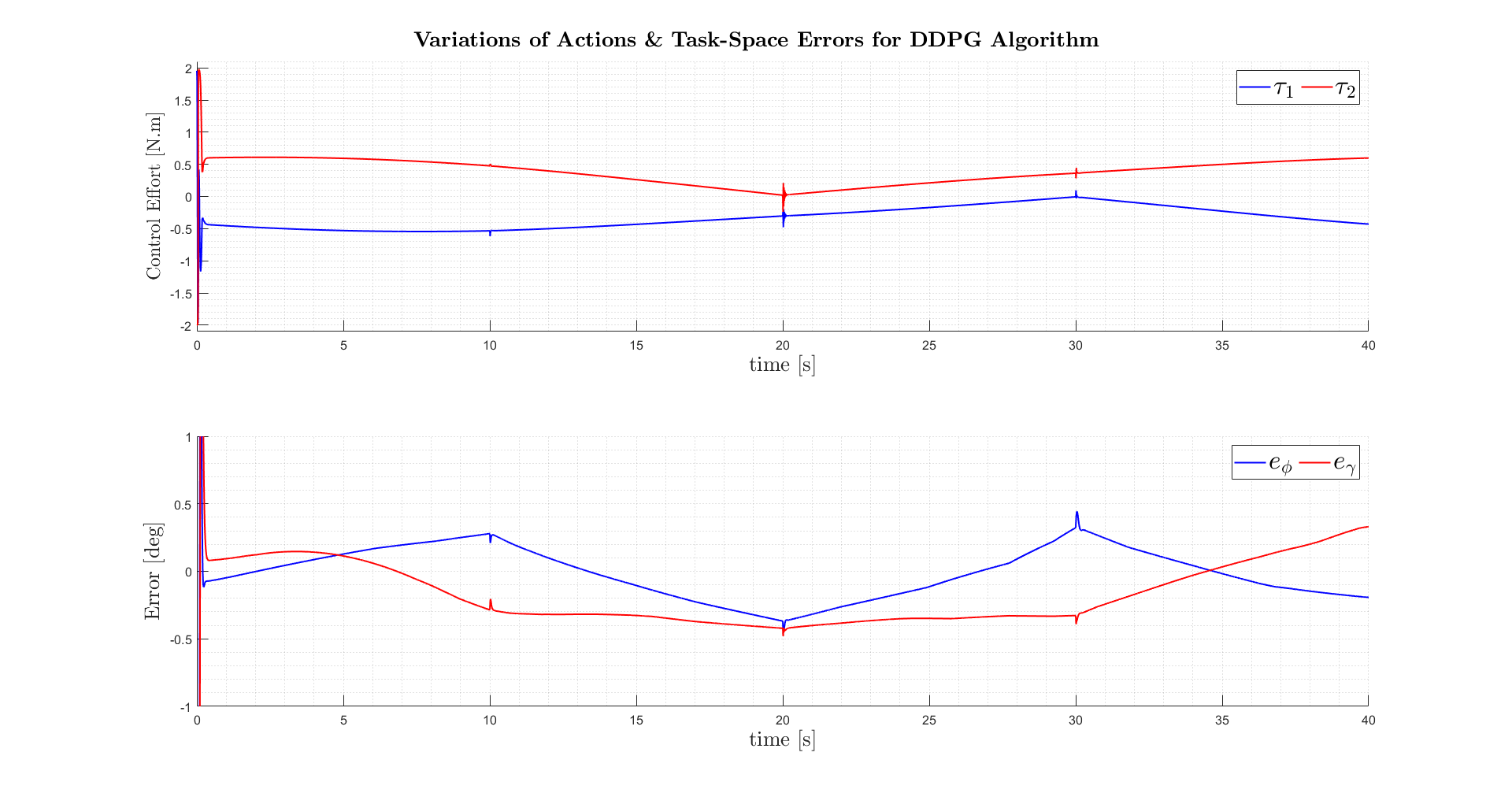
ARAS-Diamond is a spherical parallel robot designed and developed at the Advanced Robotics and Automated Systems (ARAS) Laboratory for application in vitrectomy eye surgery. This research investigates the design of an integrated control system for the ARAS-Diamond, addressing orientation control, gravity compensation, and force distribution within a unified framework. The approach leverages deep reinforcement learning with the DDPG algorithm to optimize control performance under nonlinear dynamics. Assuming the end-effector’ position is fixed at the Remote Center of Motion (RCM), two orientation angles of the robot are regulated within the workspace. To evaluate the controller’s effectiveness, two reference trajectories for the end-effector’s orientation, expressed in terms of workspace variables, were designed. The corresponding results, illustrated in the accompanying plots, demonstrate accurate trajectory tracking and effective force distribution, validating the capability of the proposed control strategy.