Project information
- Title: Learning-based Control for Mecanum Wheeled Mobile Robot
- Supervisor: Prof. S. Ali A. Moosavian
- Project date: July 2024
- Code: nima.maghooli@ut.ac.ir
Further detail
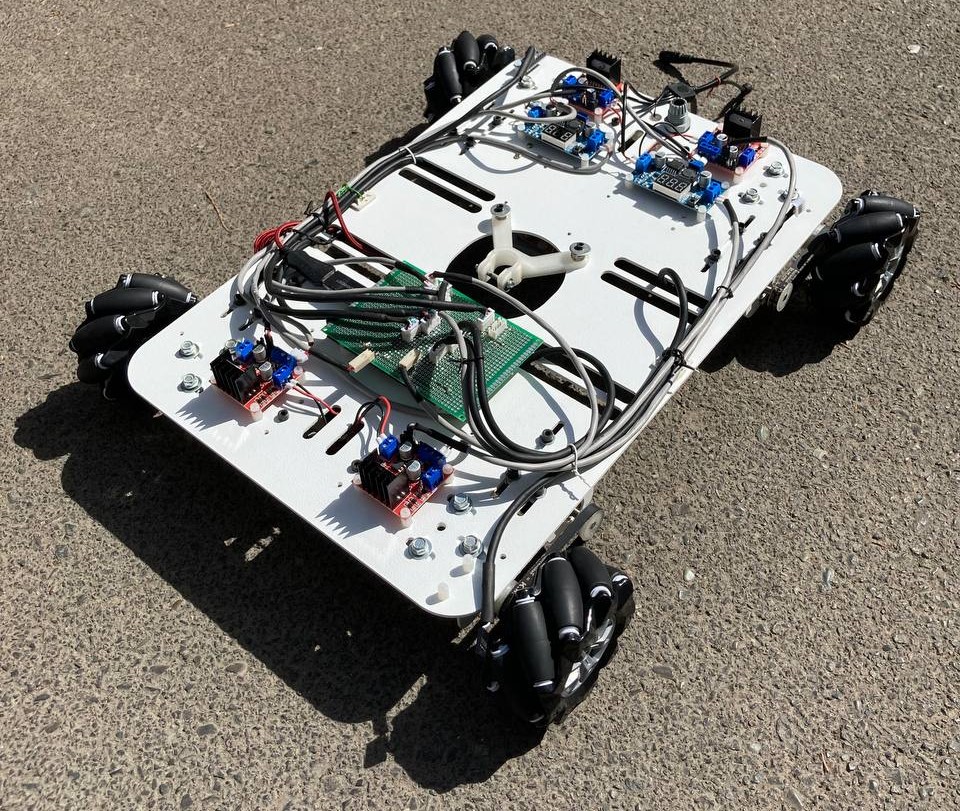
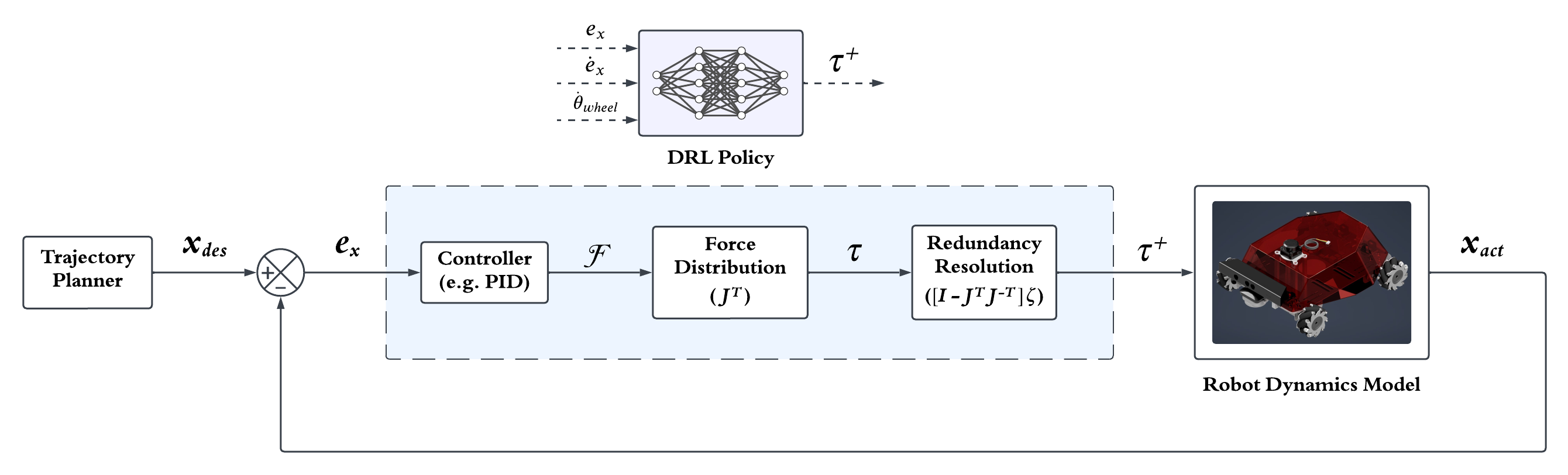
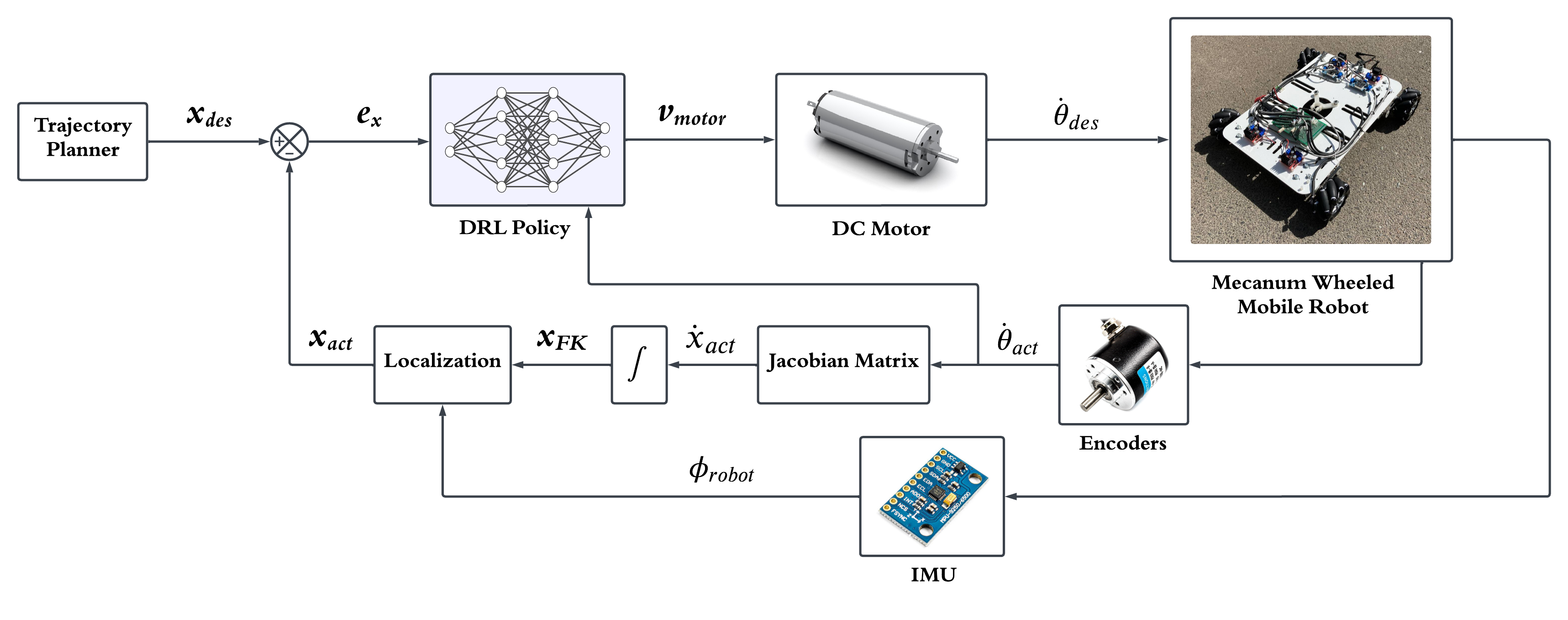
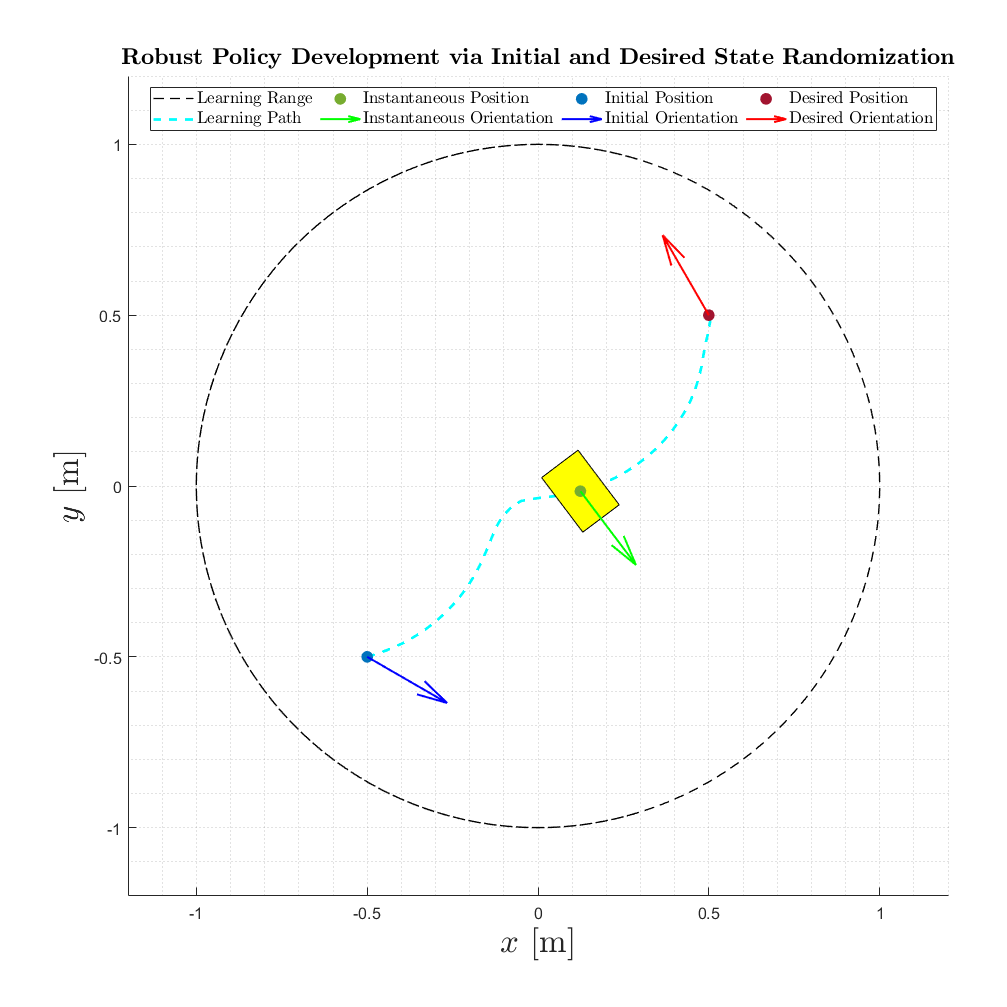
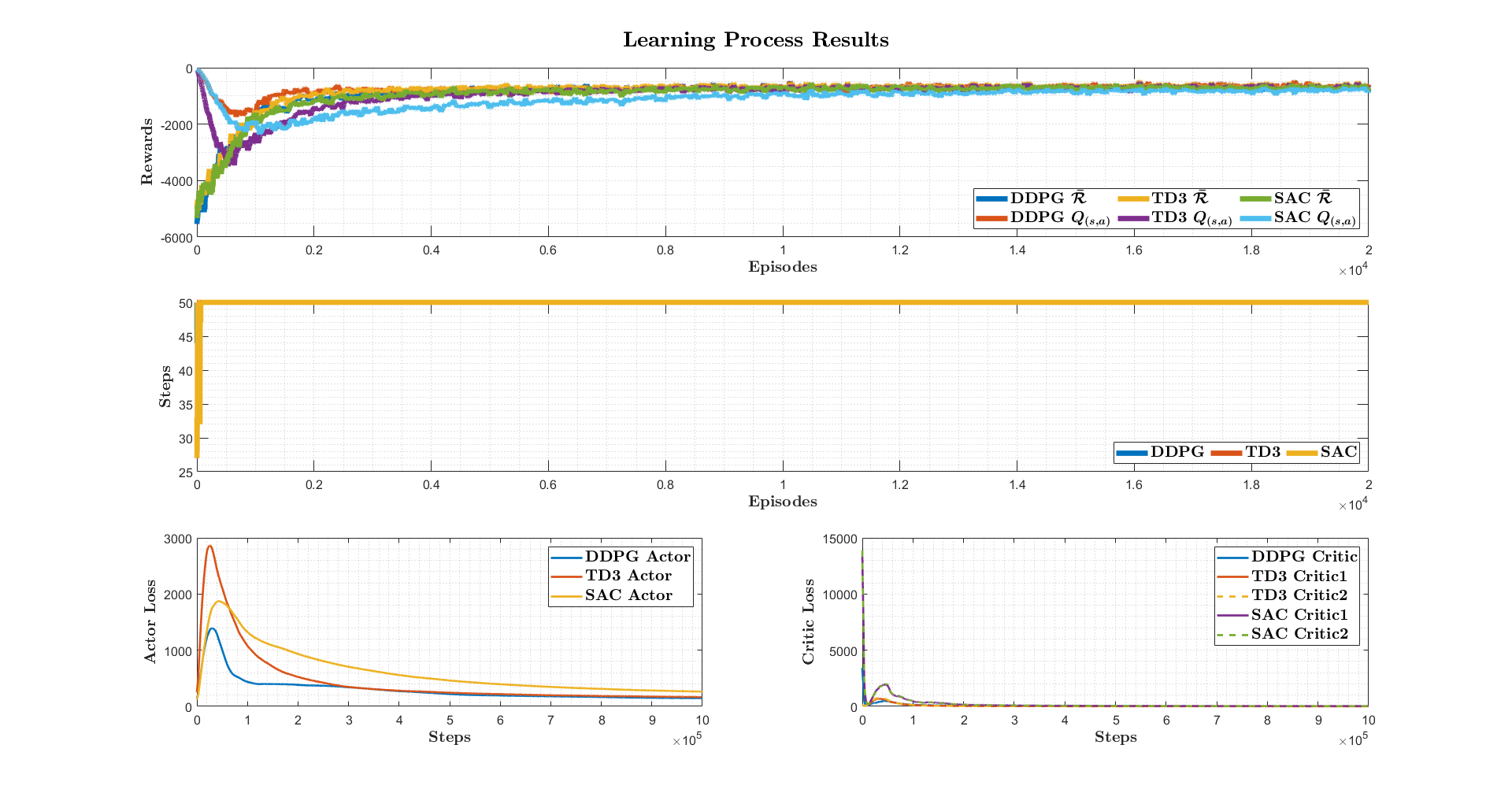
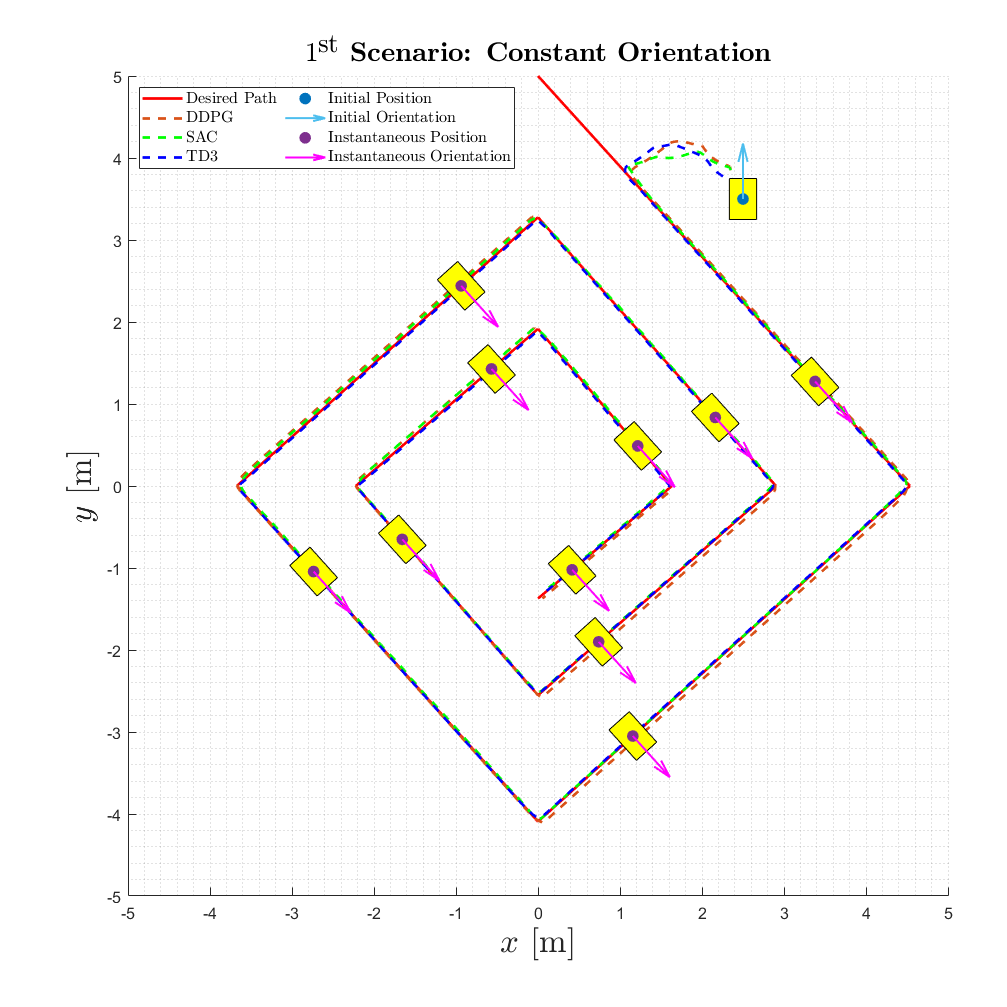
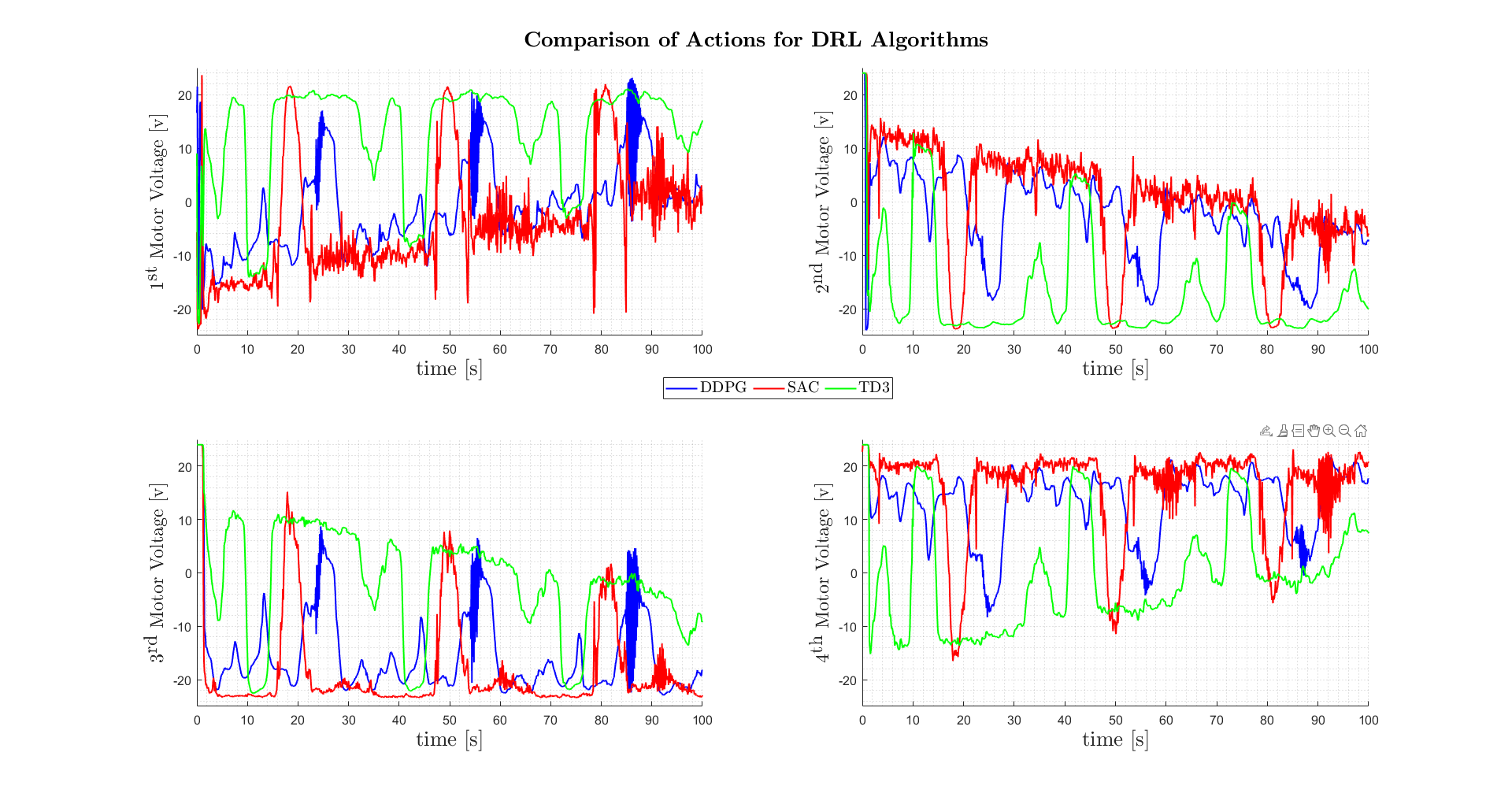
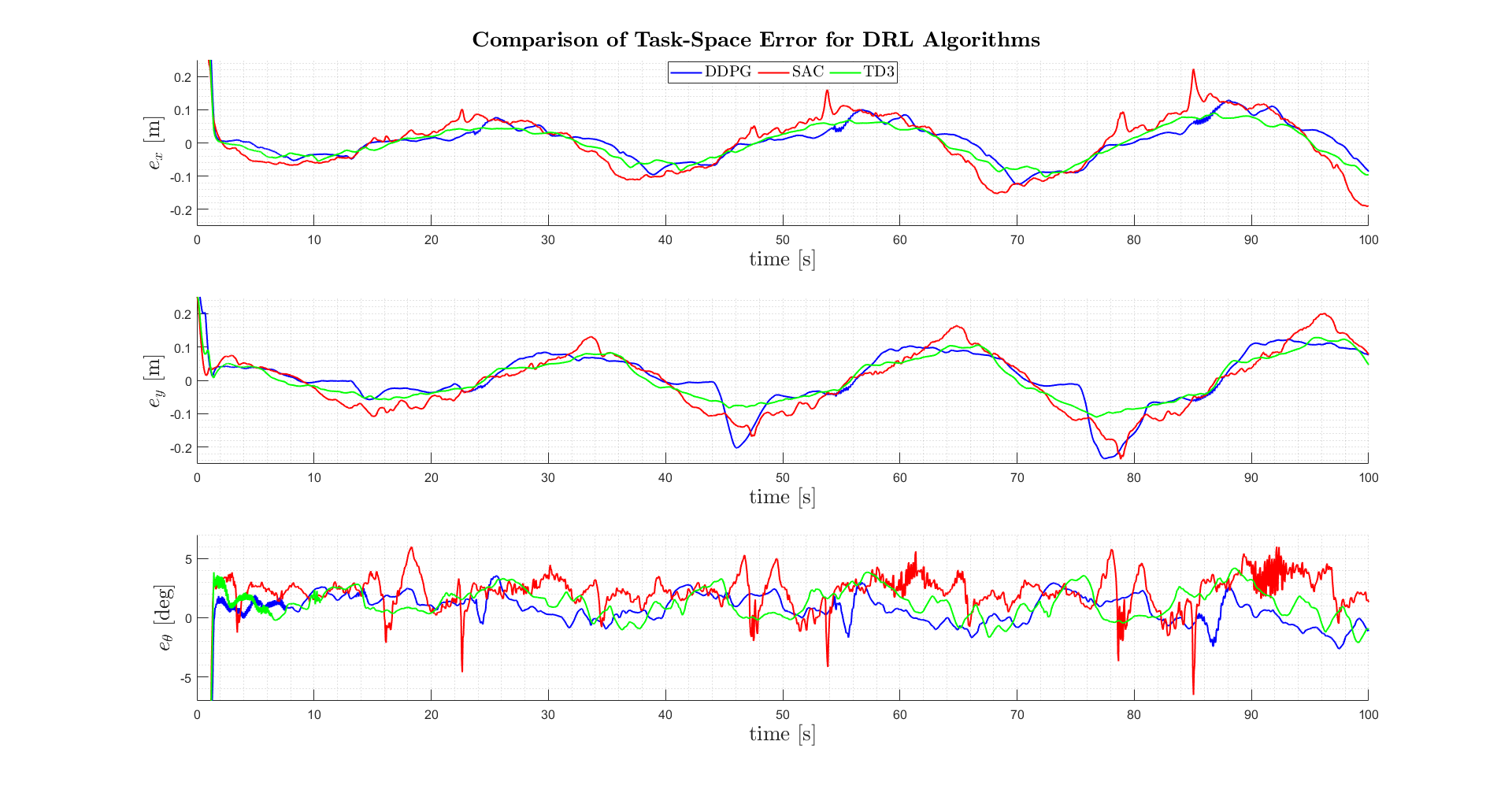
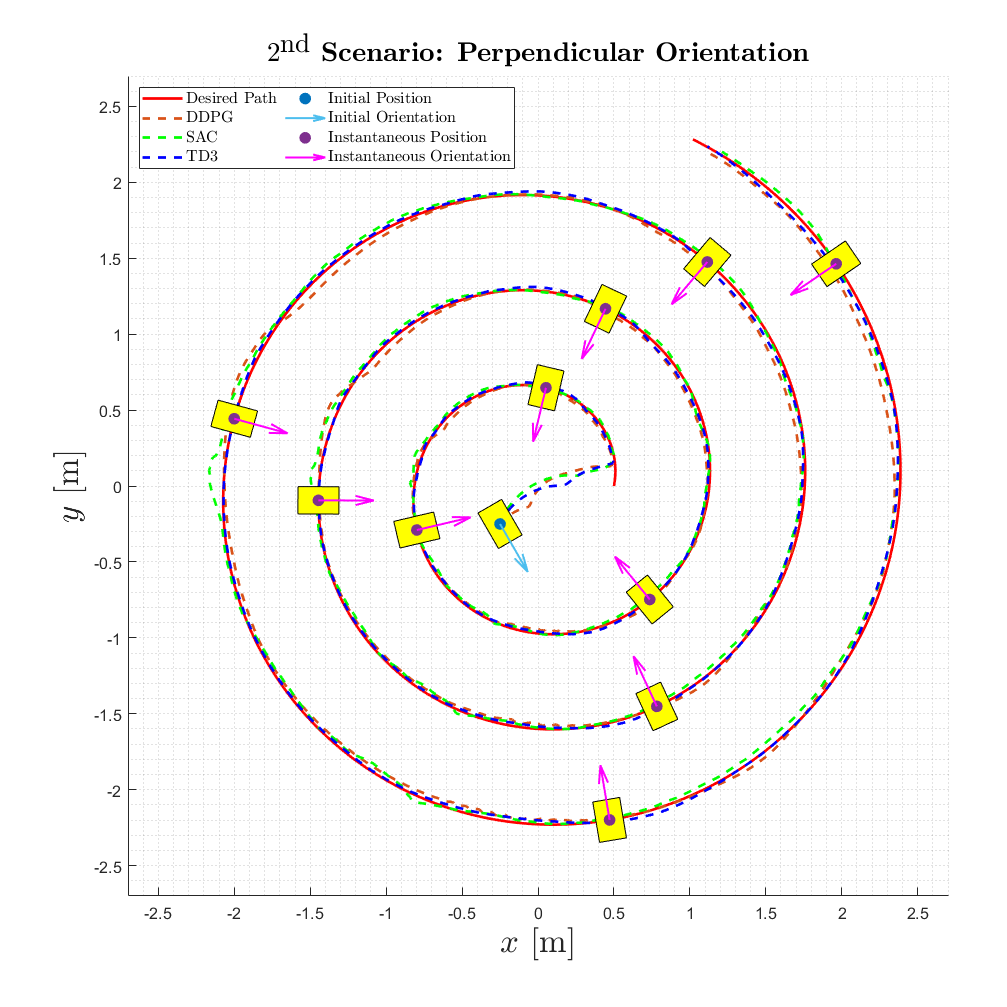
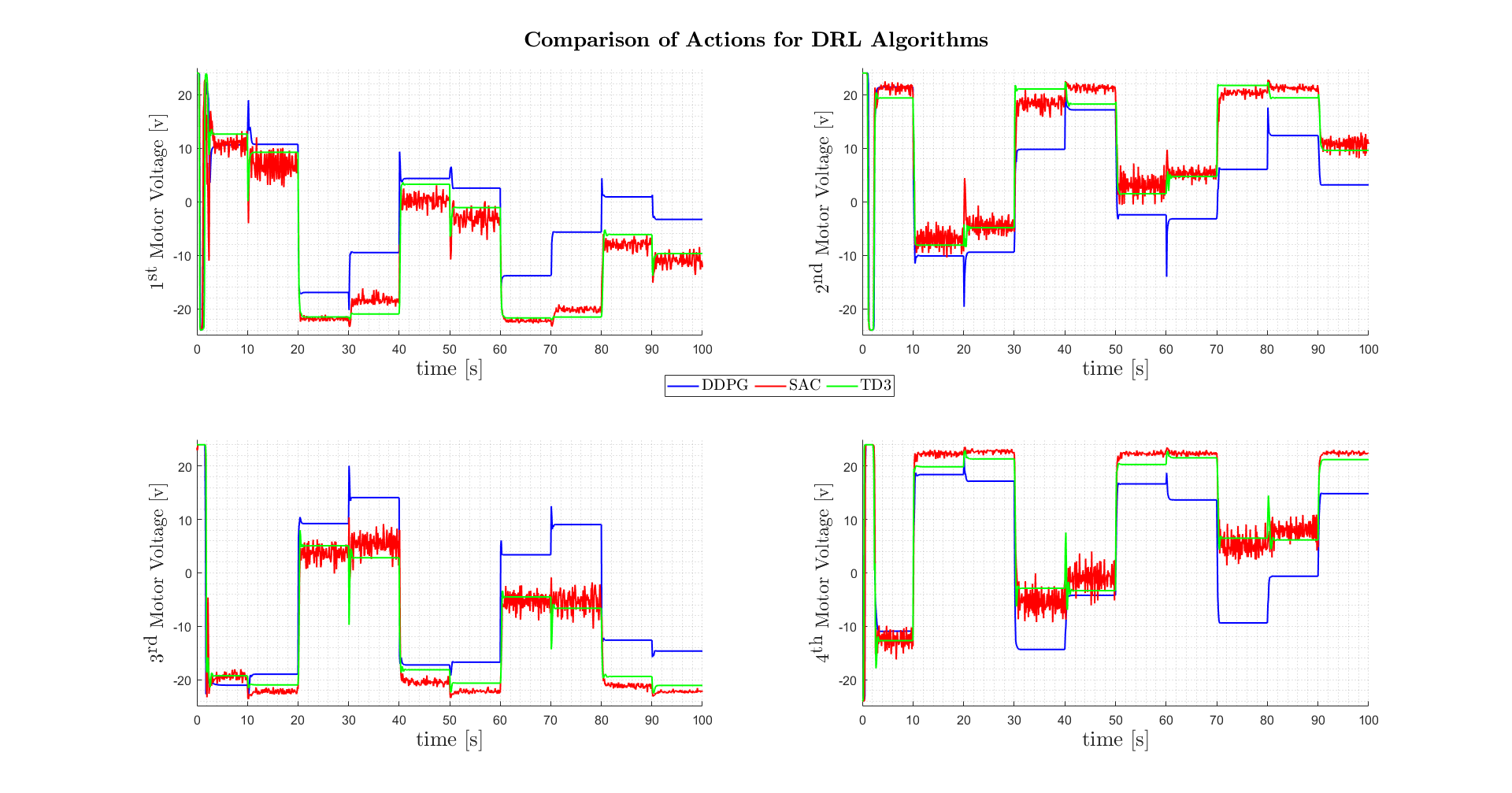
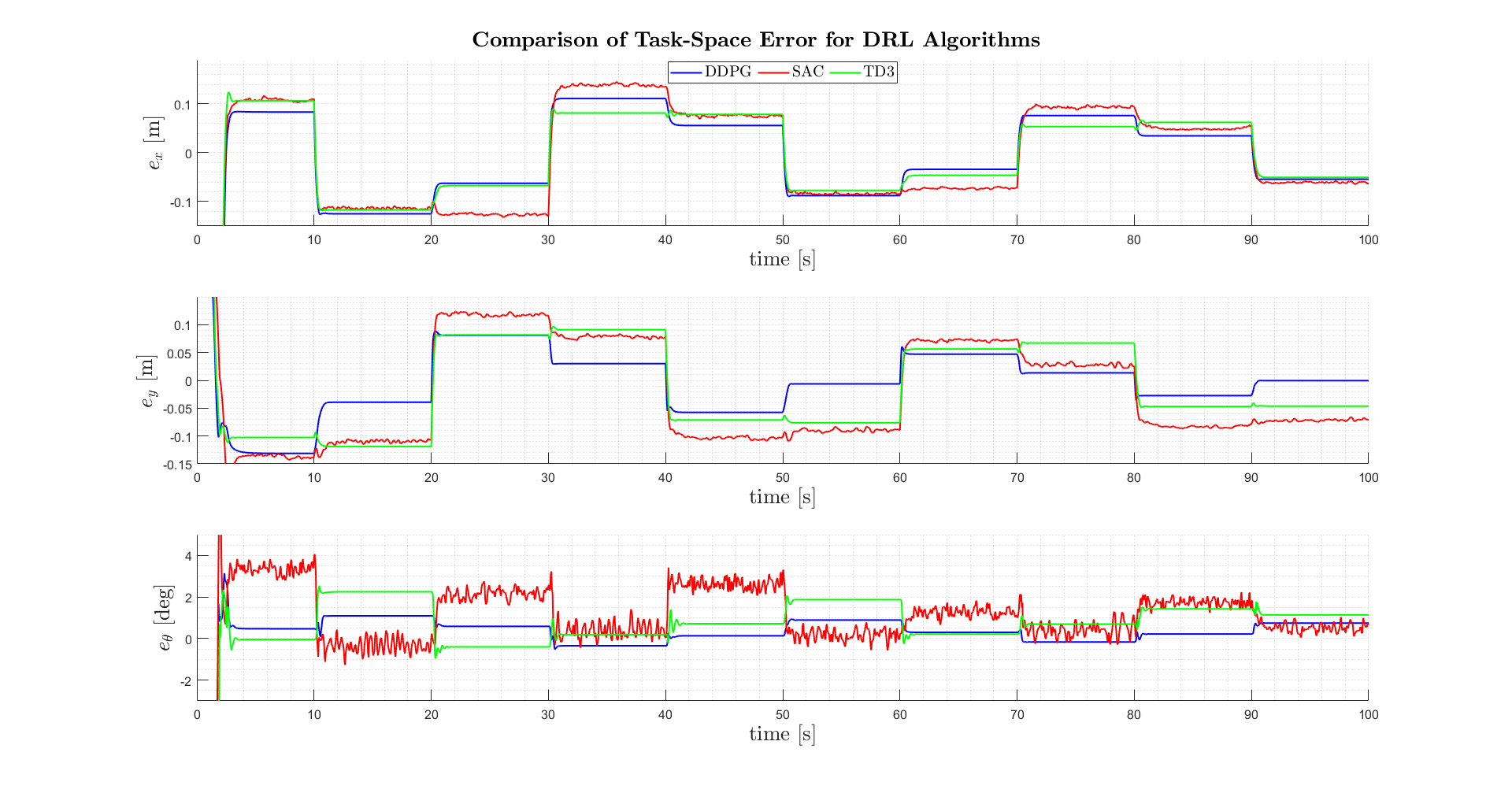
Robo-Omni is a Mecanum-Wheeled Mobile Robot designed and built at the Advanced Robotics and Automated Systems (ARAS) Laboratory to eliminate nonholonomic constraints in mobile robots and enable unconstrained planar motion. This research focuses on the development of a unified control system for a Mecanum-Wheeled Mobile Robot that simultaneously addresses position control, force distribution, and redundancy resolution. A compact learning phase within a confined 1-m radius workspace enables the robot to generalize its motion planning and execute arbitrary trajectories beyond the training region. To achieve this, three state-of-the-art reinforcement learning algorithms—DDPG, SAC, and TD3—were employed to optimize the controller’s performance under varying dynamic conditions. To illustrate the controller’s effectiveness, two canonical scenarios specific to Mecanum Robots were implemented, highlighting the robot’s capability for decoupled translation and rotation. The outcomes, presented in the accompanying figures, demonstrate smooth trajectory tracking, stable torque allocation under redundancy, and robust performance across diverse path-following tasks.