
Project information
- Company: Sina Robotics and Medical Innovators Co., Ltd
- Employer: Dr. Alireza Mirbagheri
- Project date: March 2024
- Detail: nima.maghooli@ut.ac.ir
Further detail
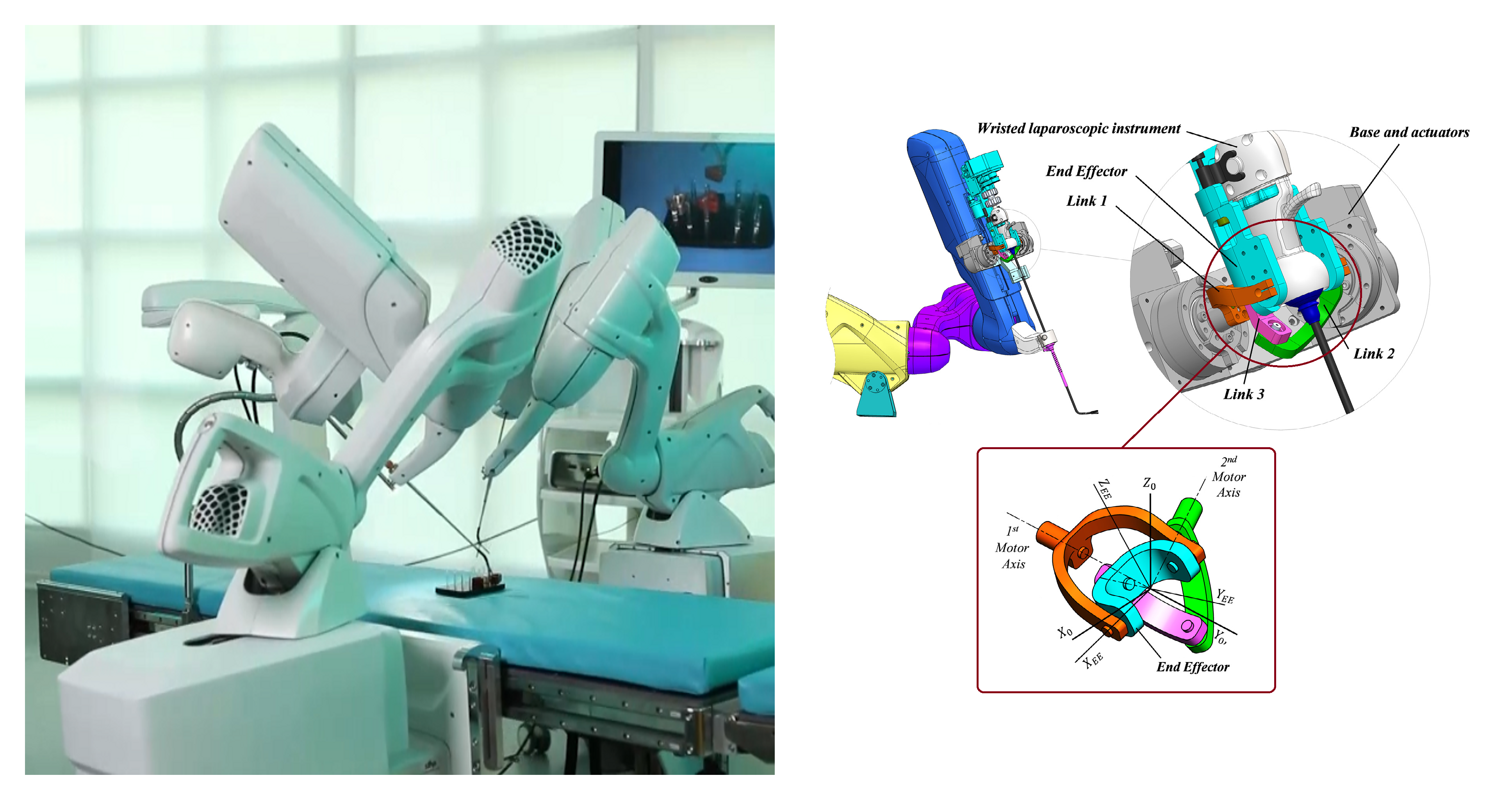
Deriving analytical equations for forward and inverse kinematics and Jacobian matrices of both master and slave robots, aimed at integration into the control loop and the development of a digital twin.