About Me

Roboticist and Researcher in Robot Learning
I’m delighted to welcome you to my website. Here, you’ll find a comprehensive overview of my work, background, and research interests.
- Qualification: MSc in Mechanical Engineering, majoring in Dynamics and Control
- Academic Affiliation: Advanced Robotics and Automated Systems [Part-time]
- Industrial Affiliation: Sina Robotics and Medical Innovators Co., Ltd [Full-time]
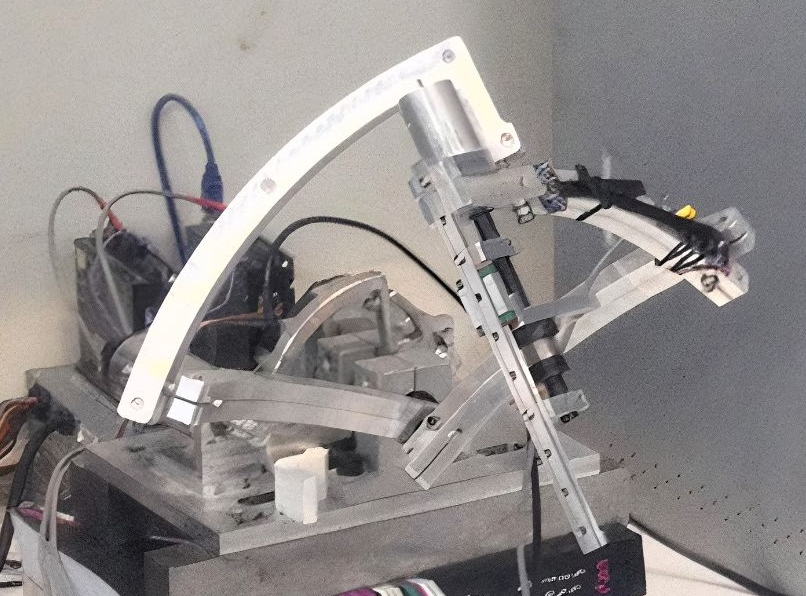
I am passionate about leveraging robotics to automate high-precision tasks, particularly in domains such as Minimally Invasive Surgery. During my MSc thesis, I focused on Tendon-Driven Continuum Robots, which are extensively used in surgical robotics due to their flexibility and dexterity. After graduation, I joined Sina Robotics and Medical Innovators to contribute to the development of Master-Slave Telesurgical Robotic Systems, applying my background in robot dynamics and control. My current research interests lie at the intersection of robot learning and intelligent control. While learning-based methods have shown remarkable capabilities, they often lack reliability in safety-critical applications. I am deeply motivated to address this challenge by advancing robust, learning-based control strategies. I plan to pursue a PhD to further explore this field, with the long-term goal of leading a research lab dedicated to developing impactful, reliable robotic systems that serve real-world societal needs.
Below are some of the academic and professional institutions I’ve worked or collaborated with.





Resume
Work Experience
Roboticist and Program Developer
Feb 2024 - Present
Sina Robotics and Medical Innovators Co., Ltd, Advanced Medical Technologies and Equipment Institute (AMTEI), Tehran, Iran
-
Selected Projects
- Sina Robotic Telesurgery System Analytical Modeling: Deriving analytical equations for forward and inverse kinematics and Jacobian matrices of both master and slave robots, aimed at integration into the control loop and the development of a digital twin.
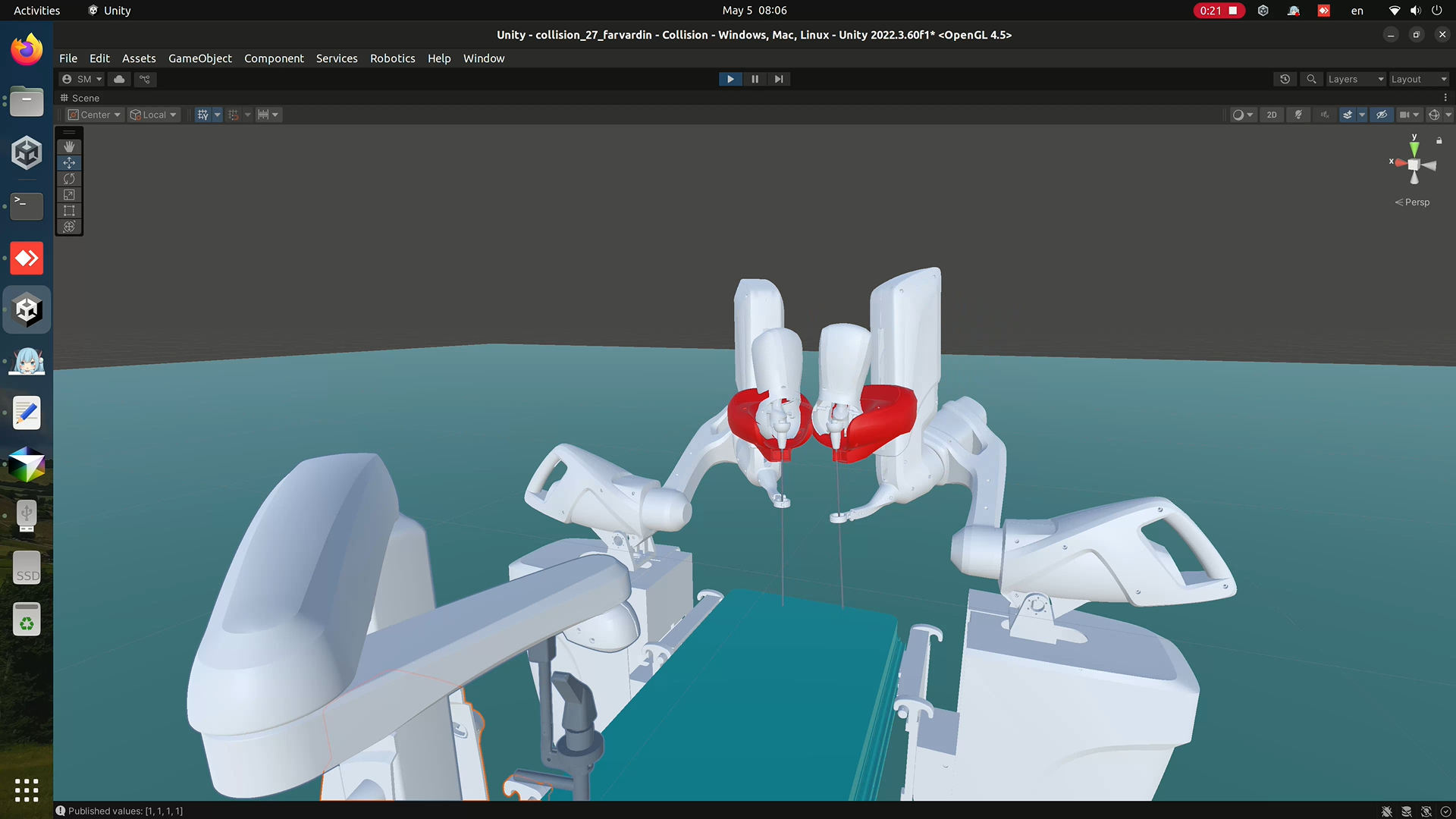
- Digital Twin for Collision Detection: This project focuses on the development of a real-time digital twin environment that replicates the motion and interaction of robotic arms used in surgical procedures, enabling accurate and immediate collision detection and risk mitigation through live data synchronization and geometric modeling.
Research Interests
- Robot Learning and Learning-Based Control
- Data-Driven and Intelligent Control Systems
- System Identification and Parameter Estimation
- Transfer Learning for Sim-to-Real in Robotics
Education
MSc in Mechanical Eng. (Dynamics & Control)
Sep 2020 - Sep 2023
K. N. Toosi University of Technology, Tehran, Iran
- Supervisor: Prof. S. Ali A. Moosavian
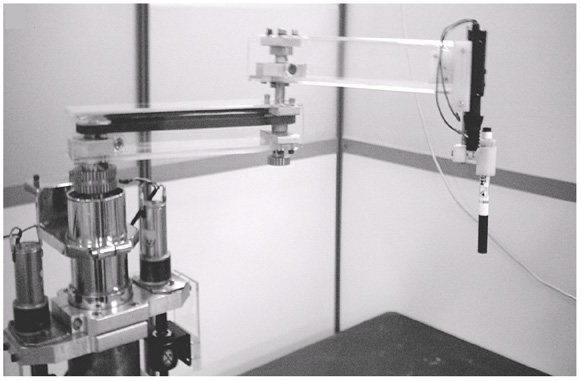
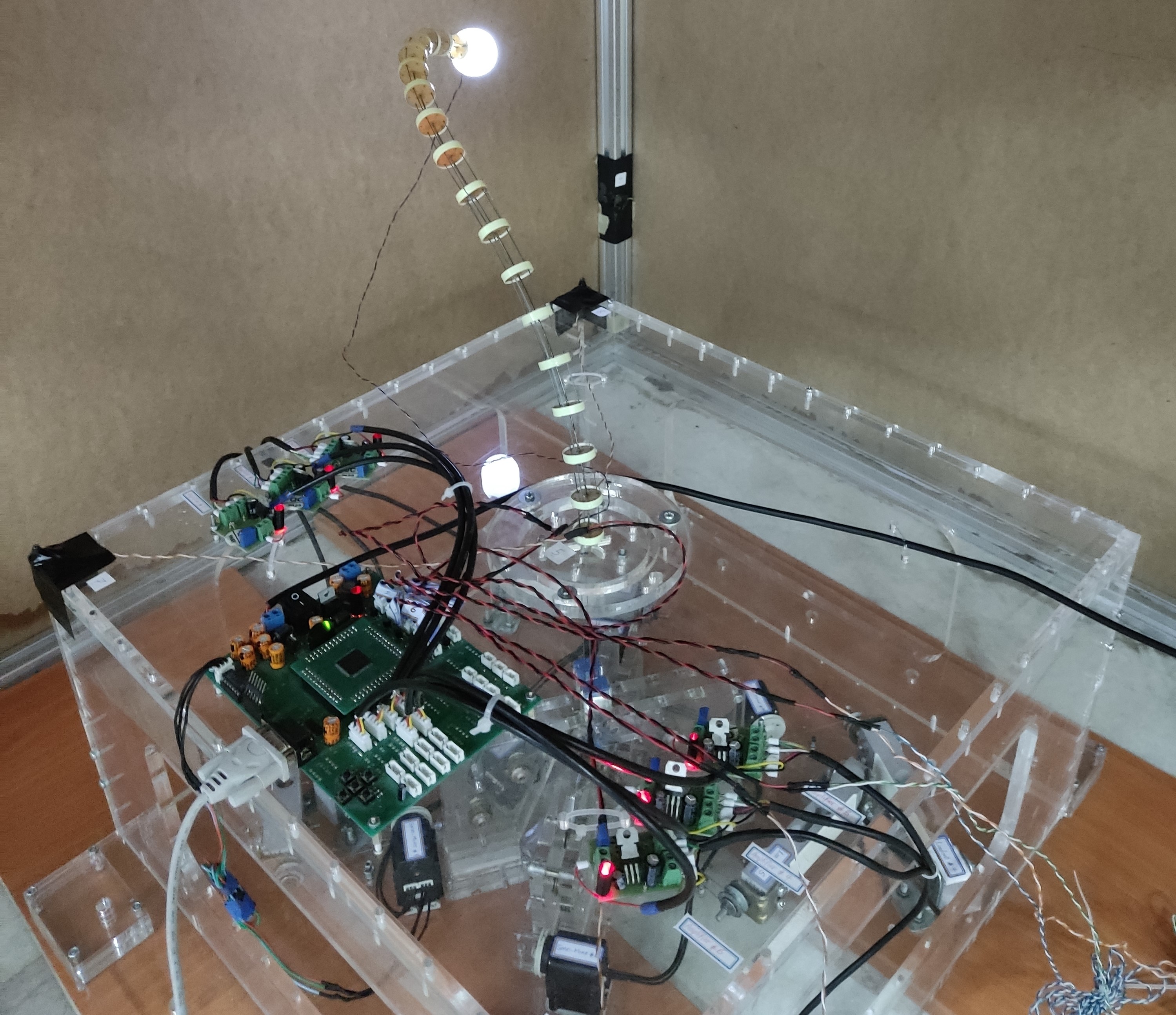
- Thesis title: Design and Implementation of Intelligent Control System for Tendon-Driven Continuum Robots Using Vision-Based Deep Reinforcement Learning [Proposed Control Strategy] [Thesis Demo]
BSc in Mechanical Eng.
Sep 2015 - May 2020
University of Tehran, Tehran, Iran
- Supervisor: Dr. Tara Farizeh
- Thesis title: Analysis and Evaluation of Human Gait Patterns for Rehabilitation Applications
Research & Teaching Experience
Graduate Research Assistant
Sep 2021 - Present
Center of Excellence in Robotics and Control, Advanced Robotics and Automated Systems (ARAS), Department of Mechanical Engineering, K. N. Toosi University of Technology, Tehran, Iran.
- Supervisor: Prof. S. Ali A. Moosavian
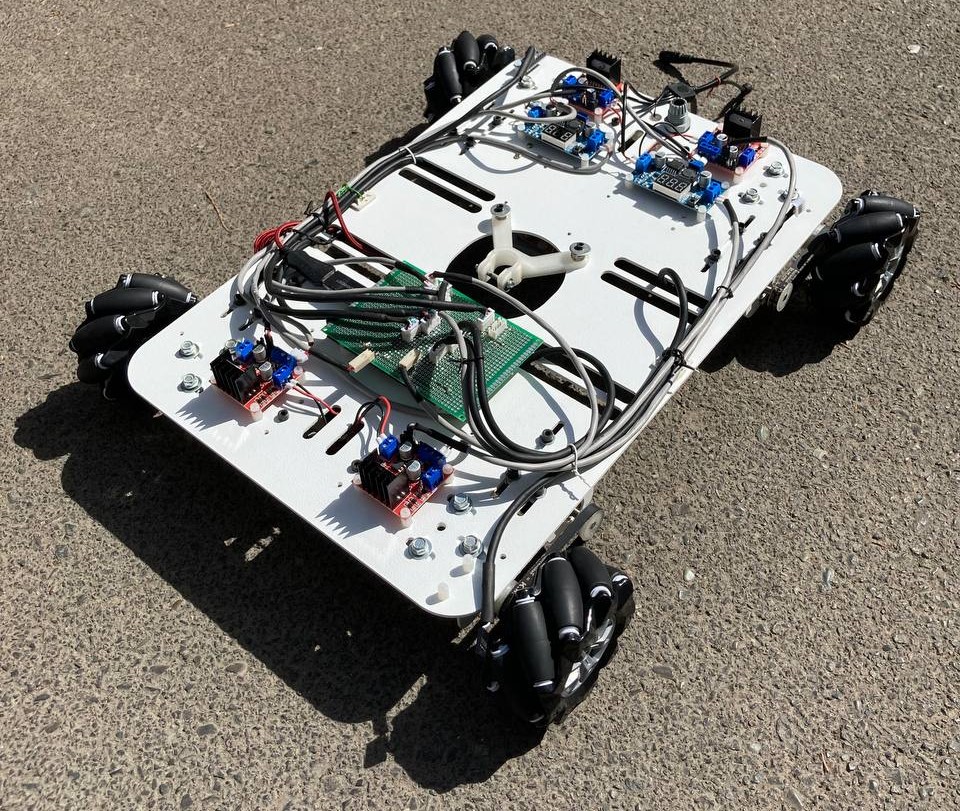
- Research Platforms: Tendon-Driven Continuum Robot | Mecanum-Wheeled Mobile Robot | Vitreoretinal Eye Surgery Robot Published Papers
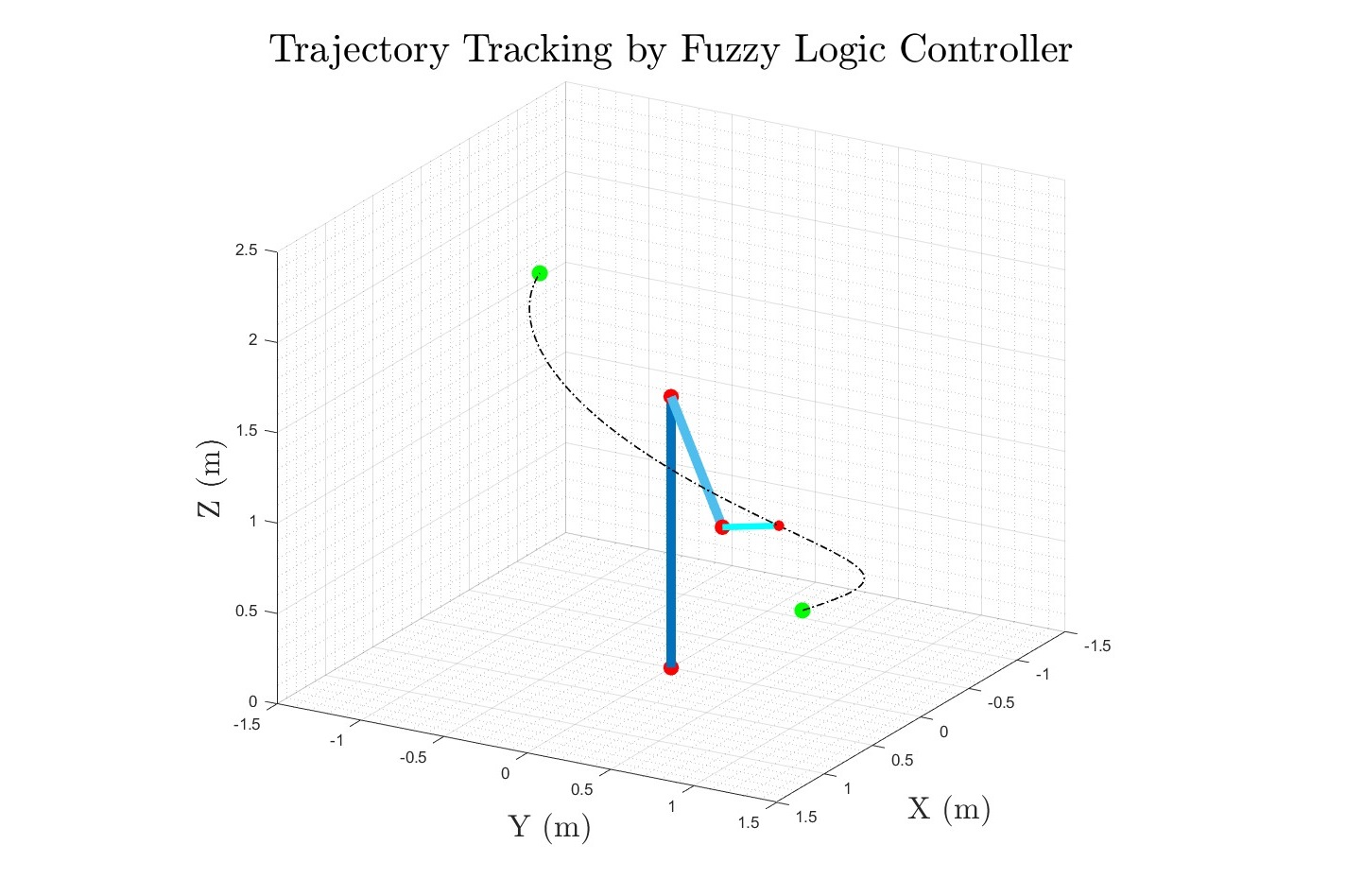
- Learning-based Control for Tendon-Driven Continuum Robotic Arms [Link] [Supplementary Video]
- Control of Continuum Manipulators with Shape Constraints via Deep Reinforcement Learning [Link] [Animation]
- Intelligent Model-Free Control for Tendon-Driven Continuum Robotic Arms [Link] [Animation]
- Self-Tuning Robust Tracking Control for Autonomous Underwater Vehicles [Link] In Progress
- Learning to Move: A DRL-Based Study on the Control of Mecanum-Wheeled Mobile Robots
Graduate Teaching Assistant
Sep 2021 - Sep 2023
Department of Mechanical Engineering, K. N. Toosi University of Technology, Tehran, Iran
- Advanced Robotics | Instructor: Prof. S. Ali A. Moosavian
- Advanced Dynamics | Instructor: Prof. S. Ali A. Moosavian
Course Syllabus: Kinematics & Dynamics Modeling, Path & Trajectory Planning, Position Control, Force & Impedance Control
Course Syllabus: Classical Dynamics, Analytical Dynamics, Stability Analysis
Download Links of TA Class Recorded Videos
Department of Mechanical Engineering, University of Tehran, Tehran, Iran
- MATLAB-Simulink Workshop | Organised by: Scientific Association of Mechanical Engineering, University of Tehran
Workshop Title: Control System Design and Optimization for Linear & Nonlinear Dynamic Systems
Portfolio
The following portfolio includes a selection of my academic and industry experiences and projects.
- All
- Projects
- Certificates
- Animations